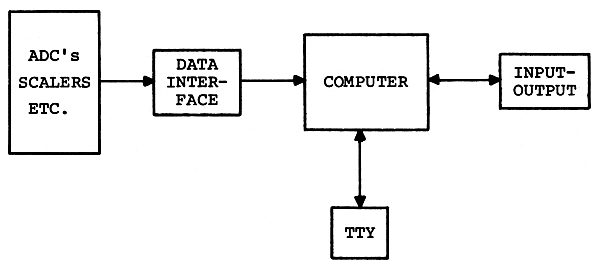
FIGURE 1 Basic data-acquisition system.
Ad Hoc Panel on On-Line Computers in Nuclear Research
Committee on Nuclear Science
National Research Council
NATIONAL ACADEMY OF SCIENCES
Washington, D.C.1970
This is a report of work under Contract NSF-C310, T.O. 47 between the National Science Foundation and the National Academy of Sciences and under Contract AT(49-1)3236 between the U.S. Atomic Energy Commission and the National Academy of Sciences.
Available from
Committee on Nuclear Science
2101 Constitution Avenue
Washington, D.C. 20418
The first digital electronic device employed to collect nuclear data was the binary electronic counter (scaler) of the 1930's. In the next decade single and multichannel pulse-height analyzers appeared, still using vacuum tubes. In the 1950's the development of multichannel analyzers continued vigorously, with vast improvement of the analog-to-digital converter sections and with the introduction of computer-type memories, based first on acoustic delay lines and a short time later on ferrite cores. The replacement of vacuum tubes by transistors beginning in the latter half of the 1950's accelerated the pace of development and application of all types of electronic laboratory instruments.
The 1960's was the decade of the computer. Before the 1960's almost no on-line computers were used in nuclear research, but since about 1962 the computer has moved into the nuclear laboratory. It provides the research worker with an immensely flexible, powerful, and accurate tool capable of raising the research output of a laboratory while eliminating the most tedious part of the experimental work.
The phenomenal speed of development of computer hardware, software, and methodology contributes to the difficulty experienced by everybody involved in decision-making processes regarding data-acquisition systems. Since the cost of a computer system is often a sizable fraction of the total cost of a new laboratory, there is urgent need for a set of guiding rules or principles for use by a laboratory director planning a system, a reviewer going over a proposal for support, or a potential funding agency considering proposals and reviews. The purpose of this report is to assist in filling this need. The material presented is current through 1969. Although we deal with a field that is developing rapidly, we hope that a substantial portion of the material covered will have long-lasting value.
The report was prepared by the Ad Hoc Panel on On-Line Computers in Nuclear Research of the Committee on Nuclear Science, National Research Council. Appointed in March 1968, the Panel first met in Washington, D.C., on April 22, 1968.
The original members of the Panel were H. W. Fulbright, H. L. Gelernter, L. J. Lidofsky, D. Ophir (through late 1968), L. B. Robinson, and M. W. Sachs. In June 1968, this group prepared an interim report. L. J. Lidofsky was on sabbatical leave in Europe and therefore could not participate during the academic year 1968-1969. Early in 1969 J. F. Mollenauer and J. Hahn joined the Panel.
The Panel has reviewed the present state of the field and has attempted to anticipate future needs. We have agreed on many important matters, including especially useful design features for computers employed in data acquisition, as well as types of organization of data-acquisition systems suitable for various purposes, types of software that manufacturers should supply, and approximate costs of systems, and we present a number of recommendations in these areas. However, the Panel makes no recommendation on standards for computer hardware, such as logic levels and polarities, because of a conviction that these are now rapidly being established as a result of sound engineering progress and the pressure of economic competition in the fast-moving computer business.
Throughout this report we have expressed opinions based on our own experience and on the best information at our disposal. The nature of the report seemed to demand some discussion of properties of specific computers by name. We have tried to be neither misleading nor unjust in our evaluations.
We wish to thank everyone who has aided us, especially P. W. McDaniel, C. V. Smith, and G. Rogosa of the U.S. Atomic Energy Commission and the many scientists in AEC-and NSF-sponsored laboratories who supplied the basic data on which the economic survey chapter is based. We are indebted to several members of the staff of the Department of Physics and Astronomy of the University of Rochester for assistance in the preparation of the manuscript, especially Mrs. Brignall and Mrs. Hughes. We also received initial directions and many helpful suggestions from D. A. Bromley, Chairman of the Committee on Nuclear Science, F. S. Goulding, Chairman of the Subcommittee on Instrumentation and Methods, W. S. Rodney and P. Donovan of the National Science Foundation, and Charles K. Reed, Executive Secretary of the Committee on Nuclear Science.
| H. W. Fulbright, Chairman | |
| H. L. Gelernter | J. F. Mollenauer |
| J. Hahn | L. B. Robinson |
| L. J. Lidofsky | M. W. Sachs |
| 1. THE TASKS AND THE COMPUTER | 1 |
| A. Introduction | 1 |
| B. The Tasks | 2 |
| C. The Computers | 3 |
| D. Matching Computers to Tasks | 5 |
| E. On Characteristic Features of Computers and Related Equipment | 6 |
| 2. DATA-ACQUISITION SYSTEMS | 16 |
| A. Introduction | 16 |
| B. A Small Time-Shared Data-Acquisition System Based on a PDP-7 Computer | 19 |
| C. A Small System Based on a PDP-8 Computer | 23 |
| D. A Medium-Sized On-Line Computer System | 28 |
| E. A Large System Based on a Single Computer (The Yale-IBM Nuclear-Data-Acquisition System) | 32 |
| F. Multiple-Computer Systems | 39 |
| G. A Process-Control System: The Brookhaven Multiple Spectrometer Control System | 48 |
| H. Relationship to a Remote Computing Center | 54 |
| 3. A REVIEW AND ANALYSIS OF EXPENDITURES | 58 |
| A. The Nature of the Data | 58 |
| B. Breakdown of Data for Analysis | 59 |
| C. Types of Computers | 61 |
| D. Some Total Costs | 61 |
| E. Breakdown of Costs by Systems | 64 |
| F. Rotating Memory Devices | 65 |
| G. Systems On-Line with Computing Centers | 65 |
| H. Anticipated Future Expenditures | 65 |
| I. Investment in Accelerators, Computer Systems, and Laboratory Budgets | 66 |
| J. Process-Control Application | 67 |
| 4. SUMMARY AND RECOMMENDATIONS ON SYSTEM PLANNING | 68 |
| A. The Need for On-Line Computer Systems | 68 |
| B. Where Should Large-Scale Calculations Be Done? | 69 |
| C. Exercising Economic Judgment in Planning | 70 |
| D. On the Utility of Small and Medium-Sized Computers | 71 |
| E. Growth Considerations | 71 |
| F. Short Summary of Conclusions Regarding System Planning | 73 |
| Appendix A: TABLES OF PROPERTIES OF SMALL AND MEDIUM-SIZED COMPUTERS | 79 |
| Appendix B: BACKGROUND INFORMATION FOR CHAPTER 3, A REVIEW AND ANALYSIS OF EXPENDITURES | 86 |
On-line data-acquisition computer systems are made in a wide range of types and sizes. In all cases at least one electronic computer is involved—a stored-program machine—because wired-program devices such as pulse-height analyzers are not considered to be computers. The rest of the system typically consists of input/output (I/O) devices such as analog-to-digital converters (ADC's), printers, cathode-ray oscilloscopes, plotters, and control devices, which may include, in addition to the console typewriter, switch boxes to simplify the control of special types of operations and perhaps a set of logic circuits associated with the input system, used to provide preliminary selection of incoming data. In a small but increasing number of cases a computer is seen dedicated entirely to a "process-control" application such as the automatic adjustment of the shim coils of a variable-energy cyclotron or the control of data acquisition in a nuclear-scattering experiment, adjustments such as changing the angle of observation being made essentially under direct automatic control of the computer. The smallest on-line systems use the smallest commercially available computers; the largest use computers bigger than those which until recently served most computing centers. Large systems sometimes include one or more satellite computers. The cost of individual systems ranges from $25,000 to $1,000,000, approximately. The total cost of computer systems in low-energy nuclear laboratories is estimated by now to have reached about $20,000,000. (There has been a larger expenditure in the high-energy nuclear field, where computer systems have been employed extensively for some years longer and where experiments are so expensive that the economic advantages of computer use were quickly recognized.)
We first list the main uses to which on-line computer systems have been put. We start with the simple operations, which we call Class 1.
Class 1 operations:
a. Accepting digital data from external devices and storing it in computer memory.
b. Preliminary processing of incoming data, on-line, before storage. This usually involves only operations of logic and simple arithmetic.
c. Controlling the presentation of data via cathode-ray oscilloscope or typewriter, often for the purpose of monitoring the progress of an experiment.
d. Controlling the recording of digital data on magnetic tape, paper tape, or other storage medium.
e. Controlling an incremental plotter.
f. Controlling the output of large quantities of data via a line printer.
g. Transmission of quantities of data between two computers or between a computer and a pulse-height analyzer or other device having a magnetic core memory.
Several operations of intermediate complexity we will label Class 2.
Class 2 operations:
a. Processing of data already accumulated and stored either in memory or on tape or other medium (off-line processing). This data reduction is often more complicated and lengthy than the preliminary on-line processing referred to in (Class 1b).
b. Calculation of information required by the experimenter during the experiment, for example, kinematics tables and particle energies corresponding to field strengths in analyzer magnets.
c. Process-control operations, in which the computer directs or regulates a sequence of events in an experiment. Under program control the computer monitors the course of the experiment and supplies signals that cause automatic changes in experimental conditions, such as starting and stopping times of event counting, angles of observation of scattered particles, and accelerator energies. Such applications [Pg 3] are designed to relieve the experimenter of unnecessary labor and to reduce the probability of error in routine operations.
Our final class involves even more complex calculations.
Class 3 operations:
a. Complicated treatment of reduced data, including least squares and curve fitting.
b. Large-scale calculations such as those required for the evaluation of theoretical nuclear scattering and reaction cross sections, e.g., DWBA calculations, which may each require running times of the order of minutes, even at a modern computing center.
Apparently Class 3 operations do not always have to be done during the course of the experiment; in fact, they can in most cases be carried out later, leisurely, at the local computing center. Nonetheless, calculations of the first type, and to a lesser extent the second, are currently being done at laboratories having large, powerful computers in their on-line data-acquisition systems.
Because computers have proved useful in so many fields, many varieties are now on the market, quite a few of them having properties highly suitable for nuclear-data acquisition. The properties particularly useful are, first, the ease with which a great variety of external input and output devices can be attached (interfaced to the computer); second, provisions for rapid, efficient response to interrupt signals from external devices; and third, usually a means of transferring data from external devices directly into blocks of memory without use of the central processor, the transfer possibly requiring only a single memory cycle per word. (This is referred to as direct memory access through a direct data channel.)
Several types of small computers have appeared on the market during the past year, some having 8-bit words, but they are too small for general data-acquisition use, although valuables [Pg 4] for special applications. For present purposes, the smallest useful machines have a minimum memory size of 4096 (4k) 12-bit words, which can usually be enlarged to 32k words by the addition of memory modules, while the larger machines have minimum memories of at least 8k, with provision for expansion to several hundred k. Regardless of their size, the machines of the present generation all have memory cycle times around 1 or 2 µsec.
Before proceeding with the discussion it is convenient to find a simple scheme for classifying computers. The scheme adopted here is to divide them into three loosely defined classes—small, medium, and large—essentially on the basis of the properties of the basic central processors:
Small
Word length 12 to 18 bits
Useful memory size 4k
Number of bits in instruction 3 or 4
Floating-point hardware orally offered
Approximate cost range $8500 to $40,000
Medium
Word length 16 to 24 bits
Useful memory size 8 to 16k
Number of bits in instruction 4 to 6
Floating-point hardware option sometimes offered
Approximate cost range $30,000 to $120,000
Large
Word length 32 to 48 bits
Useful memory size at least 16k
Number of bits in instruction 7 or more
Floating-point hardware
Approximate cost range $150,000 or more
Computers do not fall neatly into these three classifications, especially since manufacturers offer many optional features; therefore, some argument about the assignment of a particular machine to one or the other class is possible. This is especially true with respect to the small and medium types. The properties of a large number of small and medium-sized computers are given in Appendix A. Information on larger machines can be found in the Adams Associates Computer Characteristics Quarterly.
Having classified both the computers and the jobs that they may be called on to do, we now ask this question: How suitable is each of the three types of computers for each of the three classes of jobs, given that in every case the acquisition system consists of a single computer coupled to all necessary input and output equipment?
We start with the large computer system. All classes of jobs can be handled by this powerful system. However, we should question the wisdom of assembling a system based on a large machine unless a substantial amount of numerical calculating is anticipated, because the essential advantage of the large computer—the advantage that costs so much—is its capacity for rapidly executing highly accurate floating-point arithmetical operations.
The small computer system can handle the jobs of data acceptance, data manipulation, and output characteristic of the simple Class 1 operations, but they are suitable for very few jobs involving floating-point arithmetic. In fact, we must usually be skeptical about the use of small machines for any of the Class 2 operations except those of the process-control type, which in many cases would involve little if any arithmetic. (Process-control applications have been rather few to date, but a rapid increase can be expected in this field, especially because of the convenience and low cost of small modern computers.) It is apparent that these machines have been designed as economical instruments specifically intended to handle Class 1 jobs. The smallest word length of a machine in this group, 12 bits, is sufficient for storing in one word the output of a 4096-channel ADC unit, but it is not quite so convenient for handling the output of a typical scaler, which would likely require the use of two words. The capability of even a small computer system to convert experimental information into digital form, to transfer it into memory, to manipulate it, and to present it for inspection in a digested, convenient form, all at a high rate [Pg 6] and essentially without error, is of immense value to an experimenter who has to cope with the abundant outflow of data from a modern nuclear experiment.
The capabilities of medium-sized computers are less clear. These machines are superior to the small ones mainly in two respects: they have a more flexible command structure (i.e., they have a larger set of wired-in operations), and, usually, they have a longer word length. These features make them easier to program and give them a limited, but important, capability to execute floating-point operations sufficiently quickly and accurately for many purposes, even though these operations must in most cases be programmed, in the absence of floating-point hardware. We can reasonably conclude that the medium-sized machines will serve for any use listed in Classes 1 and 2. Certain simpler calculations of Class 3a are also expected to prove feasible, but few, if any, of those of Class 3b.
The value of any feature depends on its need in the application involved; therefore detailed, absolute statements regarding each characteristic usually cannot be made. However, the Panel has discussed various features at some length, and we present here some general comments on the pros and cons of these features. Among the items discussed are some, such as word length and cycle time, that represent basic, inherent properties of the computer; while a great many others, such as priority interrupts, are customarily offered as options.
The shorter the word length the cheaper the hardware, generally speaking, but the less the accuracy in calculations unless multiple precision is used. For example, although the 12-bit words of the PDP-8 match the accuracy of data from most ADC's, they are too small not to match the output data from [Pg 7] most counters; furthermore, indirect addressing is often required because a single word is too short to include both the operation code and the absolute address of a memory location. Apart from addressing considerations, a 12-bit word is too small for many uses, e.g., in general-purpose pulse-height analyzer applications where 16 bits or, better, 18 bits should be considered a minimum. Fortran programs for numerical calculations are in general best run on machines having at least 32-bit words, although 24-bit words are usually acceptable here when double precision can be used.
In general the more words that a system can retain the better; but the greater the memory, the greater the expense. The cost must be weighed against the need. For simple handling of data, a 4k memory may be adequate, but in a large shared-time general-purpose machine a 16k or greater memory is essential. In the latter case, the resident shared-time monitor will probably occupy at least 6k of the memory, so with a 16k memory only 10k would be left accessible to users, and experience has shown that this much can be taken up completely by one user compiling a Fortran IV program. A 4k memory is adequate for many process-control applications, but it is too small for many other applications such as general-purpose pulse-height analyzer use, where an 8k memory is highly desirable. Adding a supplemental rotating memory device (disk or drum), at a cost per word about 1 percent that of core storage, is often preferable to adding core memory. See 6 below.
For most purposes the typical memory cycle time of 1 to 2 µsec is quite adequate. Some of the modern computers have cycle times under 1 µsec.
These allow sequential depositing of digital data from external devices directly into blocks of computer memory without intervention of the central processor (direct memory access, DMA). Such input may require only one computer cycle per [Pg 8] word, that being the next cycle after the one during which the interrupt signal arrives. This is the fastest means of getting data into memory, but it requires more external hardware and more complex interfacing than input through an accumulator of the central processor. Most data-acquisition machines provide both possibilities. Direct data channels can be valuable for interfacing to magnetic disks, drums, and tapes.
These can be very useful. They may cost as little as $125 each, depending on the machine, and can be used to reduce greatly the overhead running time losses of the computer. In complicated data-taking applications many interrupt lines are desirable; 8 to 16 priority levels are generally adequate. The usual Fortran compiler cannot compile programs that respond properly to interrupts, although a relocatable object code generated by the compiler can always be assembled with a machine-language subroutine designed to handle interrupts. Enlargement of Fortran compilers for data-acquisition use to include statements designed to handle interrupts is desirable. (See, for example, the discussion of the Yale-IBM system, Chapter 2, Section E.)
Magnetic media—drums, disks, and standard magnetic tapes—are employed here. DEC tapes are useful and reliable, but they have only a small capacity. The use of such microtapes is also limited by their incompatibility with typical computer-center equipment. Reliable, inexpensive incremental magnetic tape units are now available which can be operated asynchronously at about 300 Hz, too slow for many purposes. Some of them can also be run much faster in a synchronous mode. Drums and disks are highly desirable because they provide program-controlled rapid access to great volumes of data. Typically, access times are of the order of 17 µsec. In the past few years, good and inexpensive disks have been developed which are now on the market. Some suppliers are IBM, CDC, Datadisk, Burroughs, DEC, and SDS. Disk storage is cheaper per word than core storage by two orders of magnitude; therefore, it is preferable for applications where data can be organized serially and where access and transfer [Pg 9] time requirements can be relaxed somewhat. For example, a small DEC disk system for the PDP-8 holds up to 128k 12-bit words and has an average access time of 17 µsec and a transfer rate of 16,000 12-bit words per sec. It costs $6000 for the first 32k of capacity, plus $3000 for each additional 32k, including interfacing through the direct data channel. Larger and faster versions are available. Disks (or drums) should be important in future systems. Magnetic tapes of the IBM-compatible type are valuable, especially for communication with machines at computing centers, but tape drives and interfacing are usually expensive. It often costs $25,000 or more to get a single tape drive in service, although the next few are usually less expensive. The cheapest tape drives available cost about $5000. The cost of interfacing depends greatly on the particular computer. It may be as little as $5000, but it is often in the neighborhood of $15,000 or $20,000.
Because they provide immediate access, the most satisfactory program storage media are magnetic disks and drums, followed by the IBM tape. The most satisfactory cheap device for input of programs is the high-speed, punched-tape reader, but the advantages of using small "cartridge-type" magnetic tapes have recently been emphasized. Recently, card readers have appeared which are much cheaper than the older IBM models. They can read 200-300 cards per minute. They cost about $2000 plus interfacing. Examples: Soroban, General Devices, Uptime.
A simple means of restoring the basic loader program (other than toggling!) is desirable. Many computers have this feature, e.g., the IBM 360 series; the SDS Sigma 2, Sigma 5, and 910 PDP-9.
Hardware memory protection is necessary in multiprogram systems. It is very helpful in any machine with a batch-processing resident monitor and in other special situations.
[Pg 10] This feature is useful for purposes as detecting memory failures, but it is usually not worth its cost in computer speed and in capital investment in the case of a small system.
This is a big subject, partly because the organization of computers for input and output of data varies with the manufacturer. Some computers such as the Hewlett-Packard and the DEC models are especially easy to interface, whereas the automatic channels of the SDS Sigma computers and the ordinary IBM machines (e.g., the 360 series) are very difficult. The IBM machines require an expensive control unit. It is said that before a competent engineer could order plug boards for Sigma interfacing he would have to study the system for a month or two. However, once interfaced, these machines permit rapid input of data. Interfacing a $5000 Calcomp plotter to the automatic channel of an IBM or Sigma series machine may cost much more than the cost of the plotter.
Many small computers use teletype machines as console typewriters. The ASR-33 teletype has not performed well, but it has recently been improved. The ASR-35 and KSR-35 have excellent records, and the newer ASR-37 and KSR-37 (15 characters/sec) are very good. The IBM Selectric has had a mixed reliability record which is, however, improving. In every case, expert routine maintenance is required.
These are a valuable asset to efficient programming. At least one, and preferably more, is desirable, especially in the medium and large computers.
[Pg 11] These are of great use for obtaining a permanent ("hard copy") record, especially when large volumes of output are produced; however, they are expensive, usually costing $20,000 or more (including interfacing). In order to avoid tying up a large central processor during typewriter output of masses of data, a line printer is not only very useful, it is essential for efficient operation (and to spare the typewriter). A line printer can be immensely helpful and can save much time in the process of developing and debugging programs. The cost, however, will often preclude its addition to a modest system. If the system has an IBM-compatible tape drive, the computer output can be written on tape and later carried to a computing center for printing. Several industrial concerns are known to be working on new types of printers, some being dry-copy, nonpercussive types. One type which has already been marketed, the Inktronic printer, operates by spraying ink at the paper from small tubes. The characters are well formed. It operates at about 120 characters per second and costs $5600. Conveniently, it requires standard Teletype interfacing, and it can be ordered with an optional keyboard. Although it has exhibited a few new-product ailments in its first 8 months or so of use, it shows promise of becoming a very useful device. Another printer operating on a similar principle has just appeared—the A.B. Dick Company's Videojet printer, priced at about $4900.
The overwhelming favorite is still the incremental machine called the Calcomp plotter. It costs about $5000 and is easily interfaced to many computers. It is very accurate (about 0.01 in. in each direction) and provides valuable output to the experimenter. It can be programmed to plot experimental points and theoretical curves together on white paper in India ink, relieving draftsmen of considerable work and doing a more precise job. Other incremental plotters are now on the market, e.g., the Houston Instruments version. Varian has developed an electrostatic plotter to sell for about $15,000.
[Pg 12] At least four types are in use. The standard scheme involves the displaying of bright spots under control of the computer, which has generated appropriate words to cause x and y deflections of the spot when those words have been transformed by ADC's in the CRT unit. The pattern is rewritten continuously. A light pen held against a particular part of the display pattern can be used to signal the computer. This scheme works well but may produce a flickering image if the computer is interrupted frequently to handle higher priority jobs or if the display is so complicated that the rewriting period exceeds 1/30 sec. The expensive hardware option called a character generator is considered not worthwhile unless large amounts of text are to be displayed. On a 10 in. x 10 in. raster a matrix of dots 1024 x 1024 is sensible.
A second scheme involves a disk or drum on which the computer writes the words to generate the pattern. Separate reading heads send the words to the CRT unit. Thus the display, automatically rewritten over and over, is updated from time to time by the computer. The light-spot cursor and joy-stick method replace the light pen in this case. (In passing, it is worth remarking that a light pen is only as effective as the computer program allows it to be, that the effort of programming for light-pen control is usually not trivial, and that a substantial amount of core storage may be required. A means of display control perhaps not so popular as it should be is sense-switch control.)
A third scheme makes use of a modern storage CRT. The computer sends the pattern to the CRT only once, and the display can persist until erased. This method is flicker-free and inexpensive, but the pattern is not so distinct and sometimes not so bright as in the above schemes. However, it is cheap. Furthermore, the storage tube can be used alternately as an ordinary CRT with quite satisfactory resolution. A storage version is thus possible which reverts to the standard scheme, for high-resolution inspection, when a button is pushed. The storage-tube scheme is probably the best buy for use in a typical small system. The Tektronix Company has recently announced a storage-tube device, Type 4501, which is said to generate a continuous video signal suitable for driving large-screen television monitors.
[Pg 13] A fourth scheme involves the generation of a video (analog) signal corresponding to the display, written on a disk or drum by the computer. Reading heads then send the video information to a CRT having a TV raster synchronized with the rotation of the medium. This is a good scheme where many displays are needed, but it is too expensive for many applications, costing upwards of $20,000 for the first unit. (For example, the Data Disc System 6500 Display costs about $23,000.)
One display feature considered desirable by many nuclear physicists is rotation of isometric data plots. This can be accomplished in one of two ways: recomputing every displayed dot or using an appropriate analog device (potentiometer). Because the latter is so cheap, clearly its use is more desirable than the recomputation of the rotated view. Also, using a light pen on a recomputed display is especially difficult because the inverse computation has to be performed in order to maintain proper correlation with the original data. However, it should be noted that the TV raster technique is limited in this respect: rotating potentiometers cannot be used, and the image must be recomputed. The technology of displays is developing rapidly.
In many cases, especially where typical standard operations are involved, it is preferable to use external devices to handle preliminary selection and sorting of events, rather than to ask the computer to do the entire job. For example, particle identification by use of signals from two counters involves one or two multiplications and additions, which can be carried out almost instantly by a fairly simple external analog device, whereas a small computer would likely require at least 500 µsec for the job, assuming calculation, and perhaps 40 µsec, assuming table look-up.
Computers as small as a PDP-8 have been successfully time-shared by several users in special applications. The justification given is that all the peripheral hardware can be shared also, so that the added constraints and programming difficulties are balanced by savings in hardware costs. [Pg 14] Computers have also been shared for simultaneous on-line data-taking in low-data-rate experiments. In working out the economics of time-sharing, the added hardware (such as CRT's and remote consoles and memory protection) needed to allow simultaneous access by more than one user, as well as the extra memory space needed by the time-sharing monitor, should be considered. The greatest costs, however, lie in the added constraints placed on each of the users and in the greatly increased cost of programming. In many cases the use of two or more identical computers is preferable. However, in large, expensive systems time-sharing can be very useful.
Complete documentation should be provided, including listings, step-by-step user instructions, and some fully worked out examples.
a. Hardware diagnostic routines: To test memory addressing, instruction set and to test correct operation of every peripheral and special hardware feature.
b. Systems to edit, assemble, and debug programs in symbolic machine language: These should efficiently use any special I/O device such as magnetic tape, disk, or line printer.
c. Efficient subroutines should be provided for operation of any special peripheral device purchased from the computer manufacturer. Symbolic language source tapes or card decks, listings with comments, and examples of use should be included.
d. Conversational Fortran-type programs provided by some manufactures are useful for supplemental calculations.
NOTE: The following points apply particularly to the medium and large machines and become increasingly important as the computer becomes larger and more complex.
e. Fortran compiler and operating system, with convenient method to insert machine language instructions and subroutines. Good compile and run-time diagnostics are essential.
f. Mathematical subroutines should be provided in binary and source language.
[Pg 15] g. Complete specifications and documentation for the programming system should be supplied, so that programs prepared by users can be made compatible. It may be objected that this will cost too much, but not to do so will be very costly and frustrating to many users.
Experience at Brookhaven and Berkeley has shown that a programmer can produce between 10 and 20 debugged and documented lines of program per day, depending on such factors as experience, when he is working on reasonably straightforward programming. When working on a complicated monitor system he would be considerably less productive. System programming is obviously very expensive, therefore the average person exploring the computer market would be well advised to consider the software support along with the hardware offered in each case. Manufacturers vary greatly in this respect. A major contributing factor to the persistent popularity of the PDP-8 is that the software support is so extensive. In general, the newer a computer, the less software is likely to be available.
The movement toward computer systems began in earnest about 1962. Much of the early work depended on the use of magnetic tape for storage of data, either raw or partially digested, the analysis of data being carried out later, off-line. More recently, computers have been used increasingly for on-line processing. The early work is well known and will not be described here. Some of the more recent systems are basically very close descendants of one or another of the early systems. Many varieties are now in service. Most incorporate small or medium-sized computers, however, extensive new experience has been gained during the past two or three years of operation of a few large time-shared systems, in particular those in the tandem Van de Graaff accelerator laboratories at Yale and at Rochester, perhaps the first large systems in operation which were planned systematically for nuclear research. Both operate with multiprogramming monitor control, background calculations being possible, on a low-priority basis, simultaneously with data acquisition.
Simple rules for the design of various types of data-acquisition systems cannot be stated, but some examples of possible systems can be given. (See Figure 1.)
a. A simple system for pulse-height analysis work can be assembled from a small computer, a 5-in. Tektronix CRO, an ADC unit, and a teletype with paper-tape attachment for a cost of about $30,000, providing that a competent engineer is available, not counting programming and engineering costs. A Calcomp plotter could be added for about $6000. To maintain [Pg 17] and operate the system at least a half-time technician-programmer would be required.
FIGURE 1 Basic data-acquisition system.
b. A general-purpose system for use in an accelerator laboratory can be assembled from a medium-sized computer, two typewriters, four 13-bit (0-8192) ADC's, six 18-bit (0-262,144) counters, a 10 in. x 10 in. CRO display unit with light pen, two tape drives (for IBM tape), a Calcomp plotter, and a fast paper-tape reader for about $175,000 plus the cost of engineering service and programming. At least one full-time technician-programmer would be needed for maintenance and programming.
c. A large shared-time system of the smallest configuration which makes much sense consists of a large computer with a 16k memory, two typewriters, a fast punched-tape reader, four DEC tapes (or the equivalent), one IBM-compatible magnetic tape, one CRO with light pen, one incremental plotter, input devices for experimental data (ADC's, counters, etc.), plus an interfacing system to link the external input-output devices to the computer. The interfacing system may include a fixed-wired "front end," such as that used at Yale, a small computer, such as that used at Rochester, or both. The hardware would probably cost over $400,000 exclusive of engineering, and to this must be added a large expense for programming, even if the manufacturer supplies a satisfactory shared-time monitor plus all the usual software. Three men would be needed to assemble, maintain, and operate the system: an engineer, technician-programmer, and a full-time programmer, or some equivalent combination, assuming use of the system in a large laboratory with an active and continually developing research program. Thus the cost of this "stripped-down" [Pg 18] system must be expected to reach $500,000 before it is in full operation, and the cost of keeping it going, including salaries, overhead, and replacement parts will likely exceed $50,000 per year, although this could perhaps be trimmed somewhat once the system is running. Furthermore, to run efficiently, the system would need additional components: another 16k (at least) of core memory, another IBM-compatible magnetic-tape drive, and a line printer. A rotating memory device would also be helpful. These would raise the cost by well over $100,000. It is apparent that large time-shared systems are so expensive that they can ordinarily be justified only in the largest, most lively research establishments.
In medium and large systems the use of small computers for coupling input and output devices to the main computer offers a number of attractive advantages, especially now that mass production and competition have brought the prices down so low that a large amount of hardware nearly ideal for the purpose is available at a bargain. Some advantages: (1) The small machine can control data acquisition, accumulating blocks of data while the large machine is doing background calculations, interrupting those calculations only occasionally to transfer raw or partially processed data. (2) The small machine can continuously control the monitor CRO. (3) It can control output devices such as a plotter, line printer, rotating memory, or tape drive. (4) It can carry out many logic operations on the incoming data. Experience has shown that such operations are numerous, and from the economic point of view they should not be allowed to tie up the larger machine, which, at the same time, can better be engaged in complicated calculations. In some cases the use of two small satellite computers can easily be justified. The chief disadvantage: Programming can be complicated. However, if the larger machine already has a time-shared monitor which recognizes the small machine as a typical input-output device (as is the case with the PDP-6 plus PDP-8 system at Rochester) the programming problem is not bad.
In the following five sections descriptions of a number of data-acquisition systems of various types and sizes will be given in order to illustrate concretely some practical system configurations. In each case a breakdown of costs and a discussion of the lessons learned in connection with planning, construction, and operation will be included. The [Pg 19] systems are of the following types: two small, one medium, one large, two multiple-CPU, and one process control.
In 1966, two identical computer systems based on PDP-7 computers were set up in two different locations at the Lawrence Radiation Laboratory (LRL), to be used by several groups of experimenters (see Figure 2). Assembly of the hardware for the first system was completed 6 months after delivery of the computer. Assembly of the second system required only 3 months. Two years after operation commenced, the first satisfactory time-sharing monitor was completed and put into service. The basic use of these systems is pulse-height analysis. In principle many other types of operation are possible.
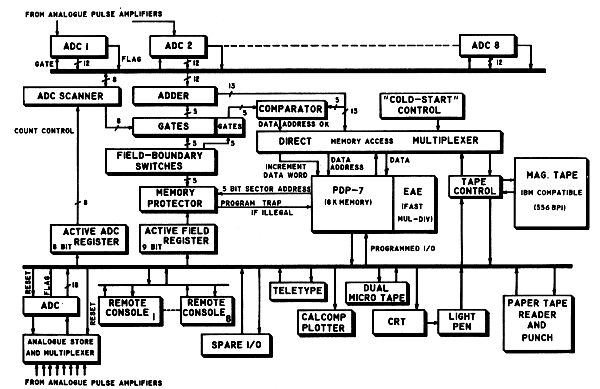
FIGURE 2 PDP-7 data-acquisition system at Lawrence Radiation Laboratory
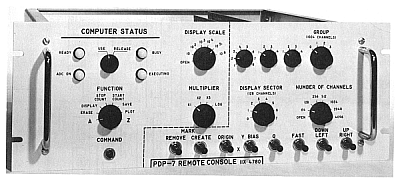
FIGURE 3 A switch panel used for data taking and control of CRT display in conjunction with the PDP-7 computer. The switch-setting codes can be read into the PDP-7 accumulator under program control and are used to select branch points in the program. As many as eight of these units can be connected to the system. The lights are used to indicate program status.
Data-reduction jobs currently possible in the shared-time operating mode include spectrum stripping, normalization, smoothing, storage and retrieval of data from magnetic tapes, graph plotting, printout, energy calibration, background fitting, peak integration, and transfer of data from a remote analyzer. Remote control of the computer from up to eight experimental locations is possible using inexpensive switch panels (Figure 3). Remote slave CRT display is also provided. Multiparameter pulse-height acquisition and analysis can be done on a time-shared basis but often requires all the computer's time and memory.
The hardware configuration is shown in Figure 2. The PDP-7 computer was supplied by the Digital Equipment Corporation with an 8k memory (18 bits) extended arithmetic hardware, microtape (Dectape), paper tape, teletype, and cathode-ray tube (CRT). The other items were built or interfaced at LRL.
Automatic memory increment and memory-protection hardware, together with suitable programming, allow a user to carry out simple data-reduction jobs with a live CRT display while two other users are independently acquiring separate, 2048-channel, pulse-height spectra in part of the computer memory, with computer-controlled-gain stabilization. ADC dead time per pulse is less that 40 µsec. Up To 6144 words of the memory can be used for data (one PHA channel per word), while machine language programs fill the remaining 2048 words of memory.
The system works well for pulse-height analysis, but for new applications, e.g., nuclear magnetic resonance magnet control, it needs additional hardware and programs.
Two groups of experimenters, doing chiefly pulse-height analysis experiments are very satisfied with the system. Another group, with a wider range of interests, has been dissatisfied because of the time lag to implement new experiments.
One programmer is now engaged full time preparing more programs.
[Pg 22] Lack of free computer time has become a limitation for both users and programmers.
Provision for programming at the outset was inadequate. One full-time systems programmer should have been assigned to these systems for 18 months.
Experimenters need Fortran or similar language capability. A disk, or more core memory, would make this practical.
The memory size is totally inadequate for multiple users because of the large amount of data space needed for the high-resolution spectra now obtainable with Ge(Li) detectors. An external 8k memory is being acquired for data acquisition in each system so that more of the computer memory can be used for computing.
Memory CRT's are needed to provide independent displays for each user. A separate teletype for each user would be invaluable.
A disk memory is needed for rapid overlay of programs and for sorting of multiparameter data.
A "czar" should have been appointed for day-to-day assignment of facilities, consultations with users, and routine maintenance and upkeep of the hardware and programs. The "czar" could be a good electronics technician interested both in programming and in physics.
System costs for the PDP-7 with time-sharing are given in Table 1. Fabrication time is included as a dollar cost. Engineering and programming times shown are one half those charged against two identical systems.
Additional special-purpose experimental equipment commonly used with the system includes gain stabilizers, analog pulse derandomizers, amplifiers, pulse pileup rejection, low-noise preamplifiers, and Ge(Li) detectors.
| TABLE 1 System Costs—PDP-7 with Time-Sharing[A] | ||
| Items | Costs | Man-Months |
| CPU (8k, EAE) PDP-7, 1966 | $ 52,000 | |
| Dual microtape | 10,350 | |
| Calcomp plotter | 4,825 | |
| Calcomp interface | 200 | ½ |
| CRT controller | 2,300 | |
| Large screen CRT | 3,500 | |
| 3 small CRT's (5 in.) | 1,995 | ½ |
| Mag tape (556 BPI, 30 IPS) (with erase head) | 8,690 | |
| Mag tape interface | 200 | 4 |
| Memory protection | 2,000 | 3 |
| Direct memory multiplexer | 2,000 | 2 |
| 2 ADC's (4096-channel, 35 µsec per count) | 5,000 | - |
| ADC multiplex interface (automatic memory increment) | 2,000 | 3 |
| 8-parameter input to ADC (analog multiplexer) | 1,500 | 1 |
| 4 remote memory switch panels | 1,200 | 2 |
| Cabling to experiments | 1,500 | 1 |
| 8k external, 18-bit, 2-µsec memory | 12,000 | 3 |
| 20 | ||
| Programming | 18 | |
| $113,260 | 38 | |
| [A] The PDP-7 is no longer made. Its modern equivalent is the PDP-15. | ||
This second example of a small computer system is also taken from experience at LRL. It was planned in February 1967 and first put into operation in the summer of 1967. Data were first taken with the aid of the system in the spring of 1968, and the system programming was completed in May 1969. The system is used extensively in experiments with the Bevatron.
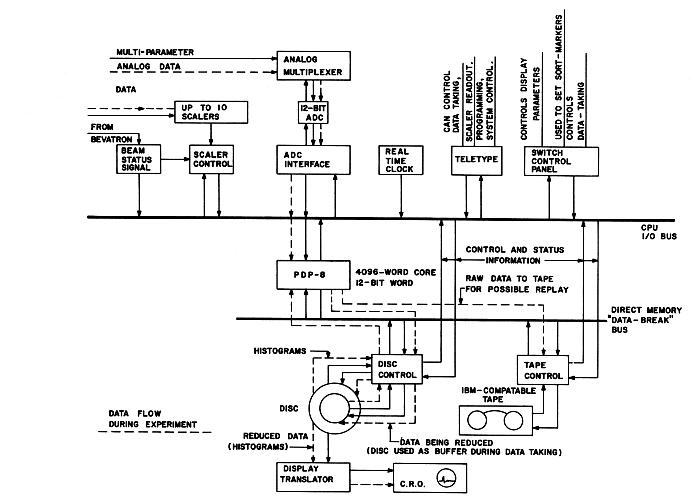
FIGURE 4 PDP-8 data-acquisition system at Lawrence Radiation Laboratory.
The computer-system hardware consists of the items shown in Figure 4. The PDP-8 has 4k of memory. The disk is a Data Disc unit with a removable disk (128 tracks and a movable head) on the same shaft as a smaller disk and three fixed data heads. Two of the fixed-head tracks are devoted to the display: they drive a hardware-translator continuously. A single display track is used when the number of points does not exceed 2000. For larger displays two tracks are used alternately.
The display is controlled from the switch panel. On-line operating functions may be controlled both from the switch panel and from the teletype.
Three classes of programming have been completed:
System Programs: Symbolic Text Editor, Assembler, a general-purpose library system—all disk oriented.
Data-Taking Programs: These cause the ADC to be read, control elementary sorting, update histograms resident on the disk, write raw data on tape, and monitor the beam. The Bevatron has approximately 1 sec of beam every 6 sec. During a beam pulse the computer is devoted entirely to acquiring data, saving raw data in core, on the disk, and on tape. After a beam pulse, the 13-disk histograms are updated, then the display programs are read into core memory and the display is updated. The system is designed to be capable of accepting over 1000 events per beam burst, and it has met this requirement.
Simple Data-Analysis Programs: These compute displays (linear, log, isometric, and contour—all double precision), read out the sealers, monitor the real-time clock, allow resorting of raw data from tape, and generate tapes for remote plotting.
The system now functions as originally intended and does its job very satisfactorily.
The experimenter relies heavily on the main computer center for data processing.
In assembling this system now, one would buy the disk already interfaced by the computer manufacturer; furthermore the manufacturer now offers programs that would greatly reduce the programming costs.
[Pg 26] A memory scope would eliminate the need for a disk-to-CRT display interface.
Less-expensive magnetic tapes are now available. However, it would be better to buy the tape already interfaced by the manufacturer of the computer.
The added cost of buying a 16-or 18-bit computer would have been almost completely offset by savings in the cost of programming.
The addition of a fast printer (e.g., Inktronic $5600) would have paid for itself in time saved during programming but would not be of much use in experiment.
The costs of the PDP-8 are given in Table 2.
| TABLE 2 System Costs PDP-8—1967 | ||
| Costs | Man-Months | |
| CPU, 4k, 12-bit | $18,000 | - |
| Data disk | 8,300 | - |
| Disk interface | 2,500 | 6 |
| CRT display control | 1,000 | 1 |
| CRT | 700 | - |
| Mag tape (556 BPI, 30 IPS) | 8,800 | 0 |
| Mag tape interface | 2,000 | 6 |
| Misc. interfaces | 2,700 | 12 |
| 8 scalers (on loan) | - | - |
| ADC (4096-channel, 35-µsec dead time) | 2,500 | - |
| 8-parameter input to ADC (analog multiplexer) | 1,500 | - |
| Remote console (switch panel) | 300 | - |
| Time-of-day clock | 1,000 | - |
| $49,300 | ||
| Systems programs | 12 | |
| Data-handling programs | 12 | |
| Engineering diagnosis, debugging | 9 | |
| 58 | ||
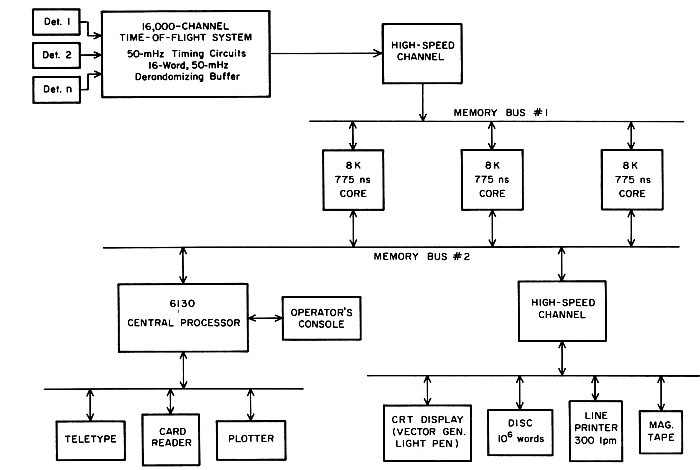
FIGURE 5 Block diagram of EMR 6130 data-acquisition system at Columbia University.
An EMR 6130 computer system has been installed and is being prepared for use with Columbia University's Neutron Velocity Spectrometer data-acquisition and analysis system. The spectrometer is characterized by high data rates and many events per burst. At present, peak arrival rates are approximately 106 events per second, with 40-60 events per burst and a burst rate of 70 Hz. The arrival distribution is random; therefore, 10 percent of the interarrival intervals are 100 nsec long, and 1 percent are 10 nsec long. In the future, peak arrival rates of 107 events/sec and 400-600 events per burst are possible, with a burst rate of 300 Hz. With an appropriate time-of-flight "front end," the 6130 will be able to handle the anticipated faster rates.
The EMR 6130 is a 16-bit, 775-nsec computer. The memory has a multibus structure which permits each bus to communicate simultaneously with a separate memory module. Up to four memory buses may be purchased. The Columbia system has two memory buses. If a high-speed buffered data channel is used, block transfer may occur at memory cycle speeds. With two buses, data may be stored in two memory modules at rates up to twice memory speed. Alternatively, one bus, channel, and one or more memory modules may be dedicated to data acquisition, while the central processor and standard peripheral devices, using the second bus, simultaneously operate in the remaining memory modules.
A block diagram of the Columbia system is given in Figure 5. The system has three 8k core modules. Memory bus 1 is dedicated to a high-speed channel serving the time-of-flight acquisition system. Memory bus 2 serves both the central processor and a second high-speed channel. Low-speed input-output devices, such as the operator's console, teletype, card reader, and plotter communicate directly through the processor. The high-speed input-output devices, namely, a magnetic tape unit, line printer, fixed head disk, and interactive CRT display, communicate through the channel.
The box designated as "time-of-flight system" represents special-purpose electronics, including a 50-mHz clock, time-quantizing [Pg 29] circuits which "clock" an input event from one of the detectors to the nearest clock pulse following its arrival, a 50-mHz counter, and a 16-word derandomizing buffer capable of storing a new word of data (i.e., arrival time) every 20 nsec. The number of channels, nominally 16,000, is limited not by the front end but by the amount of core available for histogram storage in the 6130 system. (For the high data rates anticipated in the future, the time-of-flight clock speed and derandomizing buffer data acceptance rate will be increased to 100 mHz. At the same time, an accumulating buffer of several hundred words capacity, with a 20-mHz data acceptance rate, will be added to empty the derandomizing buffer and store temporarily the time-of-arrival data prior to its transmission to the 6130 system.)
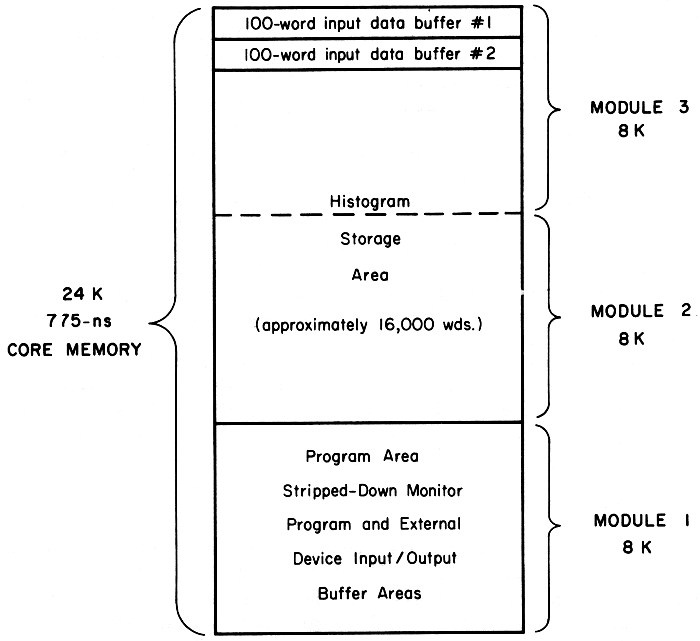
FIGURE 6 Diagram illustrating mode of utilization of core memory in the Columbia System shown in Figure 5.
During the time-of-flight experiment, memory is utilized as follows (see Figure 6). The channel dedicated to data acquisition writes on alternate bursts, into two buffer regions, of approximately 100 words each, in the top of memory module 3. The remaining parts of memory module 3 and all module 2 will be devoted to histogram storage (i.e., time-of-flight channels). Module 1 will contain a stripped-down monitor program and all data-handling programs, including buffer regions for the external devices other than the time-of-flight front end. Programs will be capable of referring to all module 1 or 2 in full concurrency with data acquisition. Reference to module 3 will also overlap data acquisition, except for a period of high input data rate of 100-to 200-µsec duration per burst. With the type of memory allocation described, the system will permit the use of all standard I/O devices, concurrent with the essential operations of input data buffering and histogram generation. Thus, new data may be stored on, or old data retrieved from, the disk or magnetic tape; either new or old data may be displayed on the CRT; and the same or other data may be output with the plotter or line printer. Control information will be input from the teletype, the operator's console, or from special-purpose switches. The importance to the physicist is that hard copy output is immediately available during data acquisition and may be used to monitor, or modify, the experiment.
Subsequent to the input data increase, a high-speed memory incrementing channel will be used to input time-of-flight data directly to the histogram area. With this channel the buffer area in module 3 will no longer be required. Histogram data will be stored in all modules 2 and 3, and no program intervention will be required for histogram generation.
Between data-acquisition runs, the system will be used for data analysis.
The computer, with two memory modules and one channel and bus, was delivered in July 1968. The remaining memory module channel and bus were delivered in the fall of 1968, the CRT arrived in June 1969, and the line printer (which was not purchased from EMR) came shortly afterward. The first time-of-flight run with this system was scheduled for December 1969. During the period from delivery to the first run, one full-time [Pg 31] programmer and approximately half the time of one physicist were devoted to the debugging of manufacturer-supplied programs and the writing of the on-line programs required for the run.
It has been hoped that the system would be used extensively for the analysis of previously acquired data, beginning shortly after delivery; however, very little such use has proved possible, essentially because of the unreliability of the 100-cpm card reader supplied by EMR. The lack of a line printer was also a factor. A more reliable reader has been purchased. The delivery of a line printer should rectify the second need.
The development of high-speed, buffered, time-of-flight front ends has been a continuing interest at Columbia. It is therefore difficult to estimate the precise costs of the time-of-flight system developed for use with the 6130. A rough estimate of the design and development time is approximately 3 engineer man years.
Columbia chose to order the EMR 6130, even though at that time (1966) it was not in production, because it seemed a very powerful machine which matched the needs of the system planners. The alternate possibility open was to order a larger, much more expensive machine of proven capability. As it turned out, difficulties in the development of the 6130 caused a delay of over a year in the delivery of the main frame and of over two years in the delivery of the CRT display. (When these delays became apparent, EMR loaned Columbia a 24-bit computer and also a small display for use during the interim period.) The EMR 6130 is perhaps the most powerful 16-bit computer available today, in spite of one or two changes in the original specifications, but in order to get it Columbia apparently traded time for money.
The costs of the Columbia University EMR 6130 system are given in Table 3.
| TABLE 3 Cost of Columbia University EMR 6130 System (Prices from EMR Except where Indicated) |
||
| 1 | Central processor with 16k core memory | $65,500 |
| 1 | Additional 8k core memory | 17,850 |
| 1 | Teletype, model 35 | 1,930 |
| 2 | Word/byte buffered channels | 10,300 |
| 1 | Additional memory bus and control | 4,300 |
| 1 | Additional cabinet assembly | 5,000 |
| 1 | Card reader, 100 cpm | 4,100 |
| 1 | Magnetic disk and control | 16,800 |
| 1 | Tape transport and control | 26,000 |
| 1 | 8 levels, priority interrupt | 1,000 |
| 1 | CRT display, including vector generator and light pen | 27,750 |
| 1 | 300-lpm line printer[B] | 18,000 |
| $198,530 | ||
| [B] Purchased from printer manufacturer with 6130 interface. | ||
Since early 1966, Yale and IBM Research have been engaged in a joint study in the application of computers to nuclear-data acquisition. The main goal was the production of an integrated hardware-software system which is fully under the control of the experimenter in the sense that he can define his entire data acquisition and analysis process with a Fortran program.
The joint study may be divided into four areas: (1) Development of a suitable general and powerful data-acquisition interface and control unit (front end) with a set of compatible nuclear instrumentation modules (scalers, ADC's, and general-purpose input registers). (2) Development of a suitable display system. (3) Development of a data-acquisition language (as an extension to Fortran) and the necessary library routines to support this language. (4) Development of a general-purpose multiprogramming system for the selected computer (the IBM System/360, Model 44) into which the data-acquisition system could be incorporated.
The first three areas became operational in July 1967, within three months after delivery of the computer, using the standard batch programming system for the 360/44 as a basis. Development continues on the multiprogramming system, which has now reached a state where users inexperienced in using the system can compile and execute Fortran programs, but the data-acquisition components are not yet operational.
Nuclear data are input by means of a general-purpose nuclear-data-acquisition interface and control unit, organized around the concept of an event, an occurrence in the real world which causes the outputs of a group of instruments selected by the user to be read into computer memory. Sixteen independent events are provided for, with each of which may be associated any or all of 30 different instruments (scalers, ADC's, or general-purpose monitor registers) by means of a diode plug board matrix. The instruments themselves, also designed and built by IBM, are modular and completely interchangeable and enable the experimenter to configure his experiment in any way desired, i.e., to determine not only which instruments are to be read but also in what order. Exclusion logic is provided to prevent processing of certain events if and when other defined events occur simultaneously (Figure 7).
The cathode-ray-tube display unit provides a 1024 x 1024 point plotting oscilloscope with seven levels of intensity, character-generation hardware, a light pen, and a programmed function keyboard, by means of which the user can call in programs by pushing buttons. Such programs can perform any function from changing displays gains to curve-fitting. They may be system-supplied or user-written and may be (and usually are) written Fortran. A parallel, high-resolution photographic system permits computer assembly of publication quality illustrations.
The data-acquisition and display-programming system is composed of a group of subroutines which may be called from Fortran programs for performing the various processes in data acquisition and display. For this purpose, a considerable number of additional statements have been added to the Fortran language. These statements perform such functions as defining multidimensional pulse-height analyzers in the computer memory, performing pulse-height analysis using incoming data as channel numbers, and defining separate programs to process each of the 16 classes of input events. All the special statements that make up the new data-acquisition language are implemented by means of a preprocessor which converts them into Fortran coding, which the standard 360/44 Fortran compiler then processes.
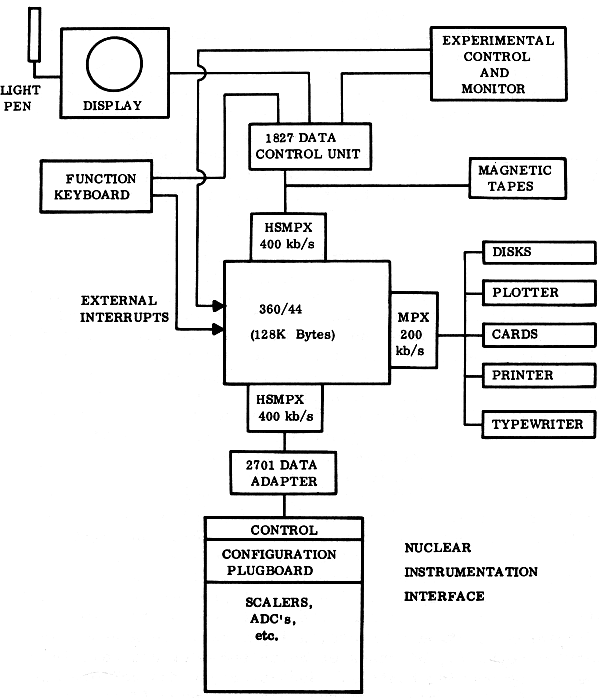
FIGURE 7 Block diagram of the IBM 360/44 system at Yale.
The general-purpose multiprogramming operating system is a multilevel priority system designed to provide access to the system simultaneously by an, in principle, unlimited number of users, each with unique priority. Unlimited means that there is no arbitrary restriction on the number of users; the nth user can always get access if the facilities his particular job requires are not already in use. Two types of user are recognized by the system: The basic unit of execution is the logical user, or task. Each logical user has a unique priority level. Switching between users is carried out as a response to I/O, timer, or external interrupts, at which time the highest priority user in a position to execute gains control of the central processor. The basic unit of memory protection is the physical user, composed of one or more logical users engaged in a common cause. Physical users correspond to real people doing independent work simultaneously. By dividing his work up among a group of logical users, a person may take advantage of the parallel processing capabilities of the system in a natural way. Since logical users within a physical user are not memory-protected against each other, they may communicate rapidly, at full machine speed. Communication between different physical users is also possible, via real or simulated I/O devices. While this system by no means guarantees execution time to any but the highest priority user, it is adequate in a single-experiment environment. The assumption is that the experimenter, who has actual control of the computer at all times, loads his logical users in the order in which he requires their priorities. Following this, other users load their jobs, getting whatever memory and I/O facilities remain. The amount of processor time available to the other users varies inversely with the experimenter's counting rate and the amount of processing he does on his data. In most experiments, the experimenter uses significantly less than 50 percent of the processor time simply because those experiments requiring the sophistication of the computer also have rather low counting rates. A priori, it is estimated that the simple priority algorithm described above is not only adequate but pays a dividend in terms of reduced system overhead time as compared to a more elaborate algorithm. It also guarantees that no data will be lost due to the lower priority users being in the machine.
In general the new system will provide all the facilities of 44PS within the multiprogramming framework, including execution of the Fortran compiler simultaneously with data acquisition.
| TABLE 4 | ||
| The Basic System | ||
| CPU: with 128k-byte memory, 1-µsec registers, external interrupts, floating point, one high-speed multiplex channel, one low-speed multiplex channel, and one single-disk storage drive |
$291,280.00 | |
| Standard I/O gear: with 128k-byte memory, 1-µsec registers, external interrupts, floating point, one high-speed multiplex channel, one low-speed multiplex channel, and one single-disk storage drive |
164,259.00 | |
| Data-acquisition and display subsystem[C]: | ||
| Display system (RPQ on 1827) with function keyboard and light pen | 19,000.00 | |
| 2972-VII Scientific Interface and Control Unit (front end) | 40,000.00 | |
| 6 LeCroy model 157M general-purpose registers and ADC interface to 2972, as designed for Maryland | 5,950.00 | |
| 2 LeCroy model 150B scaler banks (each contains eight 15-bit scalers with separate inhibit, strobe, and reset, as modified for Maryland) | 3,900.00 | |
| 2 LeCroy interfaces to connect model 150B to 2972 | 2,000.00 | |
| 4 Northern Scientific 4096-channel ADC's | 8,800.00 | |
| Data-acquisition and display subtotal | 79,650.00 | |
| TOTAL | $535,189.00 | |
| [C] As previously stated, the data-acquisition and display subsystem intalled at Yale is the laboratory prototype of the IBM equipment, for which Yale paid only a nominal sum. | ||
| TABLE 5 | ||
| Additional Items Needed to Make a System Identical to the Yale System | ||
| CPU and peripherals: additional high-speed multiplex channel with extra subchannel, high-speed (1/4 µsec) general registers, additional single-disk storage drive, memory protect, additional tape drive (240IV),[D] 1627 (Calcomp) plotter and adapter, keypunch, six additional disk cartridges |
$114,316.00 | |
| Data-acquisition subsystem | ||
| 2 additional Northern Scientific 4k ADC's | 4,400.00 | |
| 2 additional LeCroy 157M registers | 1,400.00 | |
| Costs of extras | 120,116.00 | |
| Grand total for basic system | 535,189.00 | |
| Cost to copy the Yale system | TOTAL | $655,305.00 |
| [D] About $20,000 can be saved on tape drives by using the slowest ones (30k bytes/sec) rather than the 120k bytes/sec units shown here. | ||
To the laboratory interested in developing a system of the magnitude of the Yale system, but not a copy, it must be reiterated that neither Yale's out-of-pocket costs nor the cost of copying the system represents the total cost of development. IBM's development costs are not known, but they may be assumed to be very large.
From IBM's viewpoint, the ADC and scaler project is the least successful part of the whole project. Although those instruments are technically excellent, IBM is either unwilling or unable to sell them at a price competitive with the costs of front-end and interface equipment available from the traditional nuclear instrument manufacturers. However, ADC's and scalers available from the traditional sources can easily be interfaced to the front end (whose price is in keeping with its power and versatility). The University of Maryland has followed this procedure.
We therefore present the cost of copying the Yale system by some other laboratory. In Tables 4 and 5 following the example of Maryland, we have not selected IBM ADC's and scalers but rather less expensive components from traditional manufacturers, together with suitable adapters available commercially. The prices shown are to be considered strictly reference numbers and in no way constitute price quotations.
Starting by producing an operational data-acquisition software system running within the standard batch programming system for the 360/44 enabled the system to become operational within three months of the delivery of the computer. This not only enabled it to do useful work almost immediately but also enabled important experience to be gained which is being applied to the development of the multiprogrammed version.
One of the main lessons so far is that a batch-oriented system barely begins to tap the real-time potentials of a computer such as the 360/44. In a batch system, whatever analysis is needed during data acquisition must be somehow tied to the processing of events. If this is not possible, it is necessary to stop data acquisition in order to do analysis even though, on a millisecond time scale, plenty of CPU time is available during acquisition. Multiprogramming software is necessary in order to utilize this available time. This means that multiprogramming not only makes the machine available to several people at a time, but, more important, it makes large amounts of parallel processing power available to the experimenter.
It has also been shown quite conclusively that the ability of the physicist to program his own experiment (in Fortran) gives him enormous power, power which simply would not be available on a suitable time scale if he has to queue up for the services of a system programmer.
While the generalized event structure gives the experimenter considerable ability to deal with complex experimental situations, it has an overhead associated with it which limits it to about 5000 events per second. This is, of course, adequate for all experiments that demand such an event structure. For simple pulse-height analysis, it is unnecessary overhead, but it can be "turned off" in a trivial way, by simply defining the completion of filling of the buffer as an event and calling a special pulse-height-analysis program to process the entire buffer, bypassing the event sorting. This allows for close to 100,000 pulse-height analyses per second.
There are, however, few situations that justify using a computer as powerful as the 360/44 in a manner just described (i.e., doing nothing but simple addition 100,000 times per second). Therefore, such simple experiments will shortly be handled by means of a link between an existing multichannel analyzer and the computer.
The system does not suffer from having the front end directly connected to the 360/44. The data channel on the 360/44 is sufficiently sophisticated so that it performs all the functions that one might relegate to a small CPU placed between the front end and the 360/44, without any interference with the program currently running in the CPU. The one application described above, which does warrant a separate processor, is handled best by attaching the processor to a separate input port rather than by placing it between the front end and the computer. This enables it to do its intended job without acting as a bottleneck in jobs requiring the power of the front end. It also, incidentally, will function as a completely separate data input terminal if two simultaneous terminals should ever be required.
The particular display system employed has worked very well. Because the display list is in the main memory of the computer, programming of light-pen and other manipulative actions is extremely easy, but at the price of large amounts of memory being tied up. It is clear that the system cannot support two such terminals if they are to be truly independent of each other. It is equally clear that the display is as useful in data analysis as it is in data acquisition. A second display terminal is therefore being added. The selected unit (built by Computer Displays, Inc.) is oriented around the Tektronix 611 storage oscilloscope. It provides both alphameric and graphic display, as well as an interactive device (a cursor moved by means of a joystick) for a price of $8000 to $12,000 plus the cost of interfacing to the computer.
At the Rutgers-Bell (RB) nuclear physics laboratory, work has been done with two different two-CPU systems. The first of these represented essentially two duplicate processors (Figure 8), and the second, now in the process of implementation, two processors of different size and capability (Figure 9). While full data are not yet available on the actual performance of the second system, an outline of the experience to date will be given.
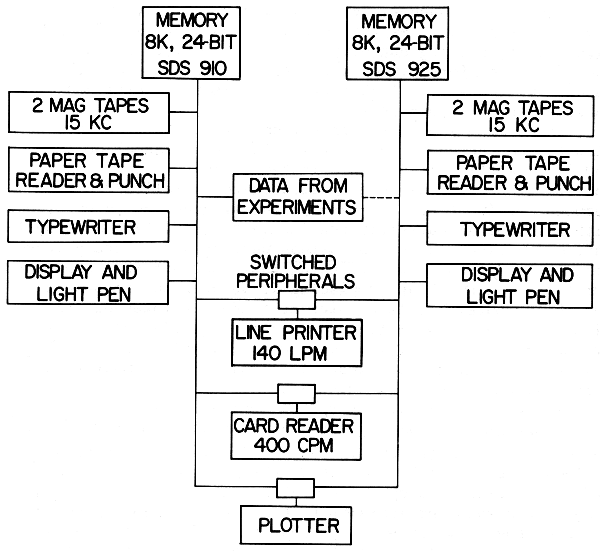
FIGURE 8 The two-central-processor system of Rutgers-Bell.
The initial success of the original RB SDS 910 data-acquisition system was soon tempered by a result of its popularity: during most experiments the computer was unavailable for program development or data analysis. Since most experiments required the use of displays and light pens in at least one stage of data analysis, the computer center could not handle the work.
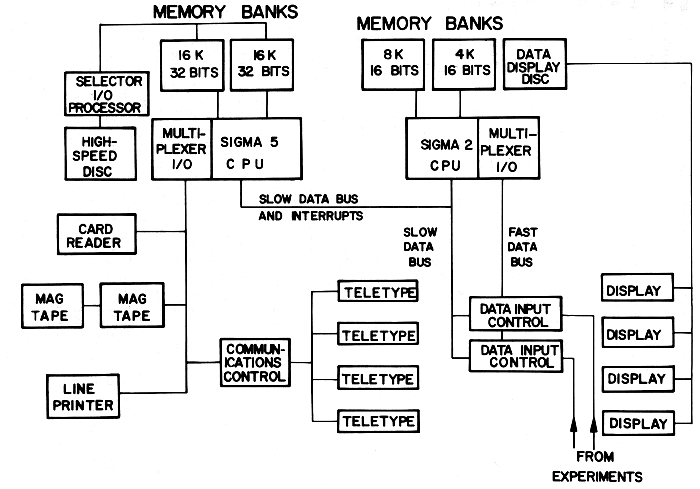
FIGURE 9 The new Rutgers-Bell Sigma 2-Sigma 5 system.
The solution adopted was to acquire another computer with the same instruction set (an SDS 925) and to provide switches such that the line printer, card reader, and plotter could be run from either computer. No provision was made for direct transfer of data from one computer to the other.
In practice this system worked out quite well. There was complete interchangeability of programs from the 910 to the 925, which differed only in being five times faster. Normally the switchable peripherals were run from the 925; when the group taking data wished to print or plot current spectra, they consulted with the 925 users, then used the peripherals with little more difficulty than permanently attached units would have involved.
A further advantage of the switchable peripherals, in addition to the cost saving, was that the experiments associated with the 910 could proceed while the peripherals were being serviced. The 910 is exceedingly reliable, averaging less that one main frame failure per year, and the 925 is nearly as reliable. The vast majority of service calls have been occasioned by the peripherals and have competed with data analysis but not with accelerator utilization.
In addition to the switched peripherals, both computers were equipped with two magnetic tape transports, electric typewriter, and high-speed paper-tape reader and punch. While these units were also subject to downtime, the paper-tape system and the typewriter could be exchanged between the 910 and 925. Only the magnetic-tape transports required the use of the 910 CPU during servicing, and the presence of two transports has usually meant that the second one could carry the load until the weekly accelerator maintenance period.
While the reliability record of the central processors has been excellent, that of many of the peripherals has not. Here is an excellent justification for renting computing equipment: if units do not work well, they can be returned. For a time, a low-cost card reader (100 cards per minute) built by NCR for SDS was used. It was unacceptable in reliability and was replaced by the Univac reader which came with the 925. Another unit returned was a cartridge magnetic-tape system built by SDS. The Ampex TM-4 magnetic-tape transports on both the 910 and 925 have been consistently poor in reliability, but no other unit has been available to replace them. A manufacturer's name does not seem to be a guarantee of good [Pg 43] or bad quality—the line printer, also made by NCR, has been excellent both in reliability and print quality.
While the two-computer system generally rated high in user satisfaction, considerations of performance have led to the design of a larger and more powerful system with totally new components. The 925, without wired multiplication or floating-point operations, was too slow for theoretical computation or for many types of data analysis such as those using Monte Carlo methods. Interactive methods of analysis, using a display and light pen, have been found very effective in the cases where the 925 could accommodate them but have not been available through either the Bell Laboratories or Rutgers computer centers.
A further limitation on the earlier system was that only one person could use the 925 at a time. The generation of a display involved the full time of the CPU, and while multiprogramming might have been able to divert some CPU time, the 8k memory size did not permit it.
Data acquisition on the 910 was limited in array size to the capacity of the core memory. For multiparameter experiments, three, six, or even twelve 4096-channel arrays have been stored in core, but the advantages of live display available with core storage have discouraged anyone from handling large arrays by logging raw data on magnetic tape for analysis later. Memory expansion would have been desirable, but the necessity of making the expansion on both the 910 and the 925 effectively doubled the cost.
Limited flexibility, then, is a major drawback of this type of system. As long as only two users needed to be accommodated, and each could adapt to exactly half of the total core storage, it was satisfactory and provided redundant facilities to guard against experiment downtime due to computer failures.
In ordering a new computer powerful enough to handle most of the nuclear physics laboratory's data analysis and theoretical computing tasks, cost ruled out the acquisition of a pair of program-compatible computers. It was recognized that desirable features of the original system would have to be obtained in new ways. Accessibility of the system for programming could [Pg 44] be improved by running a simple time-sharing monitor on it. Reliability could be enhanced by avoiding bargain peripherals and using only items of demonstrated high quality and by the capability of running the peripherals on either computer.
The use of a separate CPU for data collection still seemed particularly desirable, however. A combination of a large (by present standards) computer with a powerful small computer as a front end was designed. It includes a display disk for refreshing displays without CPU attention, as well as for storing data arrays too large to be kept in core. The computers selected were a 32k, 32-bit SDS Sigma 5 and a 12k, 16-bit Sigma 2.
The new system, with separate and nonequivalent computers, will have advantages over the old system in data analysis and general computation, because these will be done on the larger computer, either in time sharing or batch mode. Time sharing should enhance the flexibility of the system by making it easier to generate and debug new programs, in addition to improving the accessibility.
For the data-collection computer, RB will lose the advantage of a separate computer on which complete debugging of programs may be done. This loss can be tolerated since the fraction of the load carried by the Sigma 2 will be less than that carried by the 910 in the old system. In the old system, very few distinct data input or display programs were written. A few subroutines and their calling parameters sufficed for all needs for six years; the logic and I/O operations unique to each experiment were written in Fortran by the experimenters.
In the new system, the Sigma 2 will be concerned with the operations used in the data acquisition and formating of displays; most of the rest can be left in the Sigma 5, with routines sent over to the Sigma 2 under the time-sharing system. If the user should prefer, he can operate the Sigma 2 directly and make use of the Sigma 5 only for data storage.
Until very recently, program development on the Sigma 2 has been slow because it lacked means of getting program listings quickly. We have now developed an assembler for the Sigma 2 which runs on the Sigma 5. The availability of card reader input and line printer output has greatly speeded Sigma 2 software development. The loading of Sigma 2 programs is also much more convenient, since they can be stored on the Sigma 5 disk and loaded exactly as Sigma 5 programs. It seems highly desirable to have an assembler for any small data-acquisition computer capable of running on another machine; the means of transporting the object code to the small computer is of less importance.
The reliability of the new equipment has been excellent. Only the card reader has had any downtime of consequence, and modifications seem to have resolved its problems. The Sigma 5 main frame has had no failures in 12 months, and the Sigma 2 has had only one in the past year. If this record continues, the loss of the redundancy inherent in the old 910/925 system will not have any serious effects.
One component of the new system is taking on an increasingly important role, although it had not been a part of the original planning. That is the computer-independent data bus consisting of system controller, bin controller, and register units. Only the system controller is specific to a particular computer; moreover the same system controller design could be used on both the Sigma 2 and Sigma 5 by restricting the data path to 16 bits. The register units are used to interface external devices to the computer quite cheaply; a typical register used here to interface an existing Calcomp plotter to the new computers costs about $300 in parts and labor. Similar units are used to interface the Sigma 5 to the Sigma 2 and to the 910, to drive a temporary core-resident display on the Sigma 5, to read pushbutton inputs, and to read ADC's. The display disk controller now under construction uses these registers to furnish control information, although the data go directly to and from the core.
At the present time, the registers are read and written under program interrupt control, but the design is not limited to program-controlled operation. By substituting a controller designed to operate automatically (directly to core or to the I/O processor) speeds approaching 1 or 2 µsec per word transferred could be obtained. Such interfaces have been built for various computers using the European CAMAC bus system, which is conceptually similar.
The system is highly modular and is built into NIM bins with modified back connectors. Exchange of modular units has been very helpful in debugging the system, and presumably it will also be helpful in case of failures in operation. This is a much more satisfactory situation than that which was obtained with the ADC interface on which RB collaborated with Brookhaven. The latter unit was built with computer-type construction: commercial logic cards and wire-wrapped back panel. Debugging of that unit was exceedingly laborious because of the lack of modularity in its components.
The computer-independent bus system has not been expensive in manpower. It has required about 9 man-months in design and debugging and somewhat less time in construction. The registers cost about $300, as mentioned, and the controllers $1500 to $2000 depending on the need for cable drivers.
The costs of the RB multiple-computer system are given in Table 6. The figures are approximate and not the result of detailed accounting.
| TABLE 6 Systems Costs of Rutgers-Bell Multiple-Computer System | |||
| a. | Original 910/925 system | ||
| Systems/programming | 1 man-year | ||
| Interface design | 910 | 6 man-months | |
| 925 | 3 man-months | ||
| Interface construction | 910 | $15,000 including display | |
| 925 | $11,000 | ||
| Computer costs | 910 | $3,500/month; bought with rental allowance for $58,000 | |
| 925 | $ 4,800/month; including line printer and card reader | ||
| Maintenance and updating | 910 | 1 man-year, over 6 years | |
| b. | New system (including some components not yet acquired) | ||
| Planning and expediting | 1½ man-years | ||
| Systems programming | 3 man-years to date, 2 more expected | ||
| [Pg 47] | ADC interface | ||
| Engineering design | $20,000 | ||
| Construction and test | 9,000 spent outside | ||
| Parts | 11,000 | ||
| Time spent locally | 9 man-months | ||
| Data bus system | |||
| Parts | $ 5,000 | ||
| Design and debug | 9 man-months | ||
| Construction | 6 man-months | ||
| Display disk system | |||
| Disk with 64 heads and amplifiers | $ 24,000 | ||
| Interface to Sigma 5, Sigma 2, and displays | $ 10,000 (estimated, since design is not complete) | ||
| 4 14-in. displays with analog rotators and light pens | $ 12,000 | ||
| Three teletypes | $ 5,000 | ||
| Miscellaneous technical work | 1 man-year | ||
| Computer costs | |||
| Sigma 2 | $ 50,000 | ||
| Sigma 5 | $440,000 purchase equivalent, but part is leased | ||
| TOTALS FOR NEW SYSTEM | |||
| CASH COSTS | $586,000 | ||
| TIME | 8 man-years professional | ||
| 3 man-years technician | |||
In 1965, a system based on an SDS 920 computer was put into operation at the Brookhaven National Laboratory to control data-acquisition processes involving eight neutron spectrometers and one x-ray spectrometer. The neutron spectrometers are located on the floor surrounding the High Flux Beam Reactor (HFBR); the x-ray spectrometer was placed in the same building in order to facilitate linking it to the computer. The system can control the execution of experiments on all nine sets of apparatus simultaneously, yet each experimenter feels that he is working essentially independently of all other users. The system controls all angular rotations of crystals and counters, all detector counting, the data displays, the input and output operations, and automatic error responses.
It can also perform most of the calculations necessary for real-time guidance of the course of the experiments. For example, the experimenter can mount a crystal on a goniometer at approximately the correct angular orientation, then he can specify to the computer where several peaks should be found, whereupon the computer will direct the execution of a trial experiment to find where the peaks do, in fact, occur, executing least-squares calculations in the process, after which the error in crystal orientation is known and the angular scales are automatically corrected. In another example, the computer is given as input information the crystal constants (unit cell) and the zone orientation of the crystal on the goniometer and is asked to produce a scanning of a given part of reciprocal space. The computer then calculates where to look, turns to a correct angle to check the intensity of a central peak, and performs the other necessary steps, making many decisions as it controls the execution of the entire experiment.
When it was first assembled, the system included only two teletypes, both located near the computer. Early in 1969, a communications network was added to permit the installation of a local, assigned typewriter at each of the nine spectrometer stations, as well as three assignable remote teletypes located in the Chemistry and Physics buildings. This network incorporates a Varian 620i computer. It permits any ordinary operation to be carried out from any of the 12 remote stations, except program loading, which still must be done via the high-speed paper-tape reader at the computer.
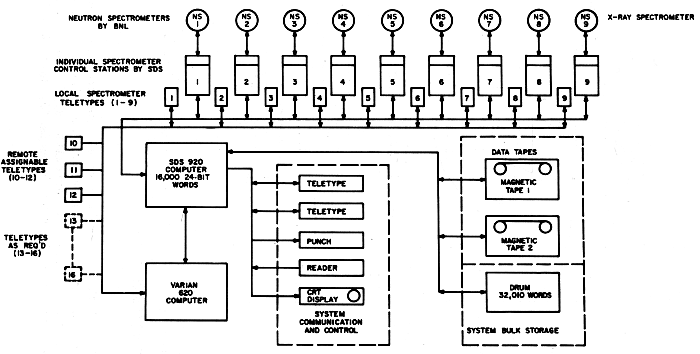
FIGURE 10 The multiple-spectrometer control system at Brookhaven National Laboratory.
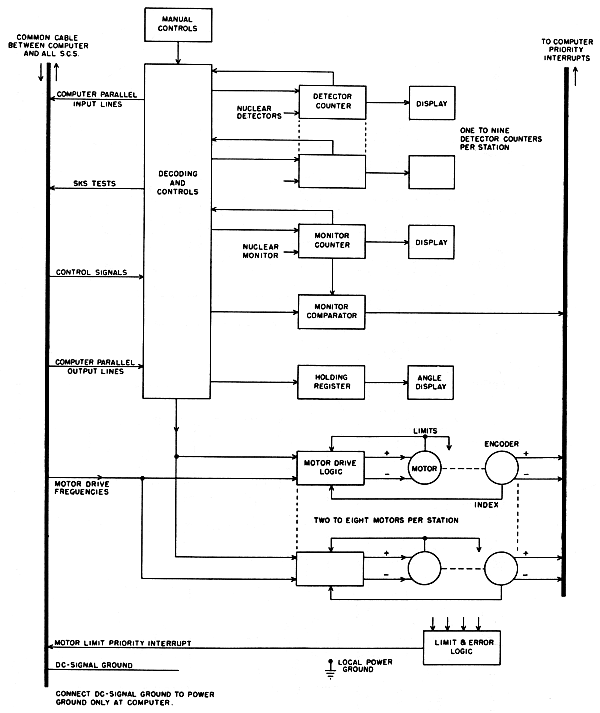
FIGURE 11 Block diagram of a single-spectrometer control station of the MSCS shown in Figure 10. [From D. R. Beaucage, M. A. Kelley, D. Ophir, S. Rankowitz, R. J. Spinrad, and R. Van Norton, Nucl. Instrum. Methods 40, 26 (1966).]
The major parts of the system (Figure 10) are the SDS 920 computer with a 16k, 24-bit memory, a bulk storage memory section comprising two magnetic tapes units and one 32,010-word drum, the communication network, and the nine local control stations (SCS) at the spectrometers. Each SCS (Figure 11) contains the stepping motors required for computer control of angular rotations of crystals and counters, together with shaft rotation encoders (optional, incremental type) to feed information back to the computer. Each SCS also includes manual controls, the electronic counters associated with the radiation detectors, counter displays, a decoding and control section, and other related equipment.
a. The system now does "all things imagined to be necessary."
b. The computer has proved to be remarkably reliable, with a record of about 40,000 hours of use without a breakdown.
c. A reasonable amount of preventive maintenance is done, mostly during the one week of four that the reactor is shut down.
d. One person serves as operator and programmer (for simple jobs). He also transports magnetic tapes to the computing center for off-line data processing and performs smaller tasks. The average user does not need to do any programming.
e. Fortunately, the people who have written most of the programs have remained in attendance and have updated the programs frequently. Machine-language programming has not proved to be a bad chore because the system is a fixed-hardware setup.
f. Modes of data collection can easily be changed.
g. The overall performance is excellent. The only problem is an occasional wiping out of a program due to the fact that there is no hardware memory-protection feature in the computer. These accidents are estimated to cost at most a loss of a few percent of the running time.
The costs in manpower and dollars of the MSCS are given in Table 7.
| TABLE 7 Cost in Manpower and Dollars of MSCS | |||||
| a. | Engineering Design and Costs (Professional Only) over 12 Calendar Months | ||||
| Man-Months | Cost | ||||
| Electronic equipment | |||||
| Development, design, construction, and startup | 15 | $ 28,000 | |||
| Mechanical development and liaison | 4 | 7,000 | |||
| System coordination, development, design, coding, etc. | 30 | 56,000 | |||
| Parameter generating, data analysis, and programming | 15 | 28,000 | |||
| TOTAL | 64 | $119,000 | |||
| b. | Construction Time and Costs (Technical) over 16 Calendar Months | ||||
| Man-Months | Cost | ||||
| System construction and interconnection | 15 | $ 17,000 | |||
| Debugging and startup | 6 | 7,000 | |||
| Documentation and drafting | 12 | 14,000 | |||
| TOTAL | 33 | $ 38,000 | |||
| [Pg 53]c. | Major Components | ||||
| Cost | |||||
| Original cost | |||||
| SDS 920 (16k mem., 96 interrupts) | $147,000 | ||||
| 15-kc mag. tape and controller | 20,000 | ||||
| 1 additional 15-kc tape | 15,000 | ||||
| Magnetic drum memory | 36,000 | ||||
| 9 Spectrometer control stations | 86,000 | ||||
| Off-line paper-tape pre. unit | 5,000 | ||||
| TOTAL | $309,000 | ||||
| Replacement: The major components of the MSCS cannot be replaced by new line units as they are no longer in production. | |||||
| d. | Operating Costs | ||||
| Normal use | Per Year | ||||
| Computer operator/programmer | $ 11,000 | ||||
| Computer maintenance | 12,000 | ||||
| Materials | 4,000 | ||||
| Misc. (minor system improvements) | 10,000 | ||||
| Overhead | 5,700 | ||||
| TOTAL | $ 42,700 | ||||
| Manpower required | |||||
| Computer operator/programmer | 1 | ||||
| Systems programmer (as required) | 1 | ||||
| Maintenance personnel (part-time) | 2 | ||||
| Note: All manpower with the exception of the on-call systems programmer has been costed in a above. | |||||
| e. | MSCS Communications Network | ||||
| The Communications Network adjunct to the MSCS was started October 1967, and it became operational early in 1969. | |||||
| Cost | Man-Months | Calendar Months |
|||
| 1. | Engineering design and programming | $25,000 | 10 | 12 | |
| 2. | Components (commercially available) | 50,000 | — | — | |
| 3. | Construction | 6,000 | 4.2 | 7 | |
| TOTALS | $81,000 | 14.2 | 19 | ||
Although the use of a small data-acquisition and experiment-control computer on-line to a remote computing center machine is not uncommon in high-energy particle physics applications, we know of few such systems presently operating in low-energy nuclear physics.
For the purposes of this discussion, we define "general computing facility" to be a relatively large-scale centralized installation charged with the responsibility of servicing a wide range of computing needs. The typical university computing center is our model for such a facility.
In light of the fact that only a few years back the remote computer on-line to a general computing facility was considered to be the wave of the future, with plans for such systems under vigorous discussion at many low-energy physics installations, it is at first sight surprising that there is so little progress to report at this time. The Van de Graaff accelerator laboratory at the State University of New York at Stony Brook was one such facility planning to couple a PDP-9 on hand to an IBM System 360/67 available at the university computing center. It is instructive to examine what happened there. In 1967, with the completion of the new accelerator scheduled within a year, it was decided that the best way to acquire the desired power and flexibility in computing support was through a coupled system of the kind under discussion. Plans were formulated for a high-speed transmission line to a control unit on a selector channel at the computer center. Since true time-sharing of the System 360/67 was not in the offing, a 128k-byte partition of high-speed core storage was to be permanently dedicated to the needs of experimental physics (including the particle-physics group), and a high-speed program-swapping drum and at least one tape drive were to be assigned to the physics users as well.
What actually happened was that as funds became available to the low-energy physics group to implement its share of the remote link to the computer center, sentiment shifted to the point of view that the funds could more usefully be invested in a second PDP-9 installed at the accelerator, and the second small-to-intermediate class computer was in fact purchased. [Pg 55] The two PDP-9's are coupled only by a switchable tape drive, with no plans at present for direct channel-to-channel communication. Plans for a remote link to the computing center have been completely dropped; any further funds for computing will be invested in larger high-speed core stores for the PDP-9's, at least in the foreseeable future.
Conversations with the principals involved in the operation of the Stony Brook low-energy physics facility fail to yield a clear and uniform explanation of the change in computing outlook. One cannot escape the impression that the group was not wildly enthusiastic about the proposed remote linkup in the first place, and that the evident immediate benefits to the group of a second PDP-9 on hand for program debugging and experiment setup while the second machine was running an experiment were irresistible when compared to the future promise of a remote link to the IBM 360/67. The physicists were not anxious to undertake what was expected to be a substantial systems program development task for the coupled system, being unconvinced that the result would be worth the effort. While they still wish to increase the computing power available to them on-site, they have elected to achieve that end by expanding high-speed core storage on their machines, at least until true time-sharing becomes available at the central computing facility.
The coupled system at the University of Manitoba cyclotron is representative of what was intended at Stony Brook. At that installation, the PDP-9 is linked to the computing center's IBM 360/65 by a control unit commercially available from DEC for about $15,000. The unit connects the PDP-9 (or its successor, the PDP-15) directly to a System 360 selector channel, without requiring an additional control unit. The maximum data-transfer rate at Manitoba over a 2000-foot twisted pair cable is 50k bytes/sec. A relatively unsophisticated set of system programs has been written to control communication and transfer of data between the two computers.
The only experiment to which the coupled system (as distinct from the stand-alone use of the PDP-9) has been applied is a p-p bremsstrahlung measurement, where the data are developed in wire spark chambers and plastic scintillation counters. Information from the wire chambers defines proton trajectories, and pulse heights from the counters determine their energies. The PDP-9 first tries to reconstruct a vertex from the proton trajectories. If a point of origin can be determined for the protons to the required accuracy, the relevant coordinates for the proton trajectories and the pulse [Pg 56] heights are sent to the IBM 360/65 for full kinematic and statistical analysis of the individual event; otherwise, the event is rejected. The large computer also prepares displays and plots of physical interest that are returned to the PDP-9 for display on the local CRT or output on the local x-y plotter.
The remote computer operates in a multiprogramming rather than in a time-shared environment, with an assigned partition of 65k bytes. Because of the well-designed program overlay feature of the 360/65 operating system, the Manitoba group does not find itself restricted by this relatively small partition. Because of other demands on the computing center, however, they are restricted in the use of this partition to 16 hours/day and 5 days/week. The operation of the coupled system is controlled almost entirely from the PDP-9 teletype, with 360/65 operator intervention required only for initial loading of the partition, off-line printout, and, of course, mounting magnetic tapes at the computing center.
Users of the Manitoba system are pleased with the cooperation and service they have received from the computing center thus far, and they are anticipating no difficulties developing as their demands on the central computing facility increase. But while use of the coupled system for experiments other than that described is clearly possible and desirable, no information was available on plans for the future.
The Brookhaven on-line remote network (Brooknet), where a pair of CDC 6600 machines sharing a common one million word extended core storage unit may be interfaced over a high-speed channel to as many as 64 remote data-acquisition computers, can be considered an extreme example of a coupled system. Although the software for Brooknet is reported to be complete and debugged, the system has not yet begun routine operation, and the first remote computer intended for low-energy physics application (a PDP-15) has not yet been delivered. (The only Brooknet user at present is the Chemistry Department, which has a remote batch terminal: teletype, card reader, and printer.)
Why has linking data-acquisition computers directly to computing centers not proved as popular as the obvious advantage of having access to an extremely powerful computer would lead one to expect? There are a number of contributing factors:
1. Since the remote computer can be used only if it is in operating condition and if the necessary personnel are present, the physicist stands to lose some of his independence and flexibility of operation (often not four-shift operation).
2. Most remote computers operate on a multiprogramming basis, hence prompt interrupts are not available. The waiting time for attention might typically be several tenths of a second, therefore the computer in the physics laboratory should be fairly powerful in order to handle the preliminary processing and buffering. With such a computer at work the necessity for fairly rapid access to the large remote machine may entirely disappear, or else the experimenter may be able to store partly processed data on magnetic tape for subsequent further reduction off-line at the computing center.
3. The total amount of time available to one user of a shared-time system per day is always limited. The amount of access time guaranteed by the computing center may not be sufficient.
4. In some cases there is a question of charges, and the total expense of involvement with the computing center may be comparable over a period of several years with the extra cost of buying a sufficiently large local computer for the laboratory to be able to handle all the essential on-line calculations. Even though the calculations may take longer in terms of machine time, they may not require as much lapsed real time if there are stringent limitations on computer center access time.
In this chapter we present a review and an analysis of total expenditures for on-line computing in a large number of laboratories supported by the Atomic Energy Commission and the National Science Foundation through 1968. (Appendix B gives the background for this economic survey.)
Laboratory directors were requested to supply a separate report covering each data-acquisition system currently in use or under construction and, in addition, to supply an estimate of anticipated future requirements for the period 1970-1974. The high-energy field was excluded. Information was also requested on process-control applications, e.g., systems to control accelerator operation or to monitor progress and to execute control functions during the course of an experiment. In every case details were to be supplied regarding the nature and capability of the system and its cost in dollars and manpower during the design, construction, and operation phases.
In all, 46 different systems were reported by 22 different institutions (listed in Appendix B). Berkeley, Brookhaven, and Oak Ridge together reported 21. The various systems range in total cost (including manpower) from about $40,000 to about $1,000,000. Most are in operation, but a few are under construction, and a few others are in the advanced proposal or design stage. Plans for 16 substantial expansions and proposed expansions of existing systems were also reported. There was a wide range of thoroughness of compliance with the request; for example, cost estimates ranged from the most meticulous analyses down to one case where no cost information whatever was supplied. In assessing the reliability and completeness of the data the reviewer concluded that in general the costs of manufactured hardware items such as central processors (CPU's), line printers, card readers, rotating memory devices, etc. should [Pg 59] be regarded as reasonably accurate, while estimates of the amount of manpower used, and its cost, seemed much less reliable; in fact, the manpower item was frequently not covered, especially in connection with the preparation of systems software. Whenever a report was more or less complete, and there seemed to be a reasonable good basis for doing so, the reviewer estimated appropriate values for missing items by making use of figures given in more complete reports on similar systems constructed or operated under similar circumstances.

FIGURE 12 Breakdown of system for analysis.
With regard to labor costs, government laboratory people seem to be in a much better position to supply figures than are university people. The reviewer got the impression that the university respondents have, on the average, a much less clear idea of the dollar value of people's time and a much less clear idea of how to estimate realistically the man-hours consumed by various projects.
Because of the nature of the data the reviewer separated each system into three parts for the purpose of analysis: (1) the data-acquisition central processor (CPU); (2) the standard computer input-output (I/O) devices such as magnetic tapes, disks, card readers, printers; (3) the complete data-acquisition subsystem (DAS). (See Figure 12.) This breakdown has the advantage that the costs of the first two parts of the system are usually fairly accurately known. The cost of the DAS includes the price of all manufactured units closely involved in its assembly, including scalers, ADC's, pulse-height analyzers, and the like (but not detection equipment), together with the expenses associated with all special construction, including engineering, fabrication, and parts. All engineering and fabrication costs associated with the entire system can logically be charged against the DAS, [Pg 60] because the CPU and I/O parts, being assembled from standard manufactured items, generally are installed by the manufacturer without much effort or expense on the part of the laboratory personnel. Questions occasionally arose in connection with the assignment of the cost of interfacing the DAS to the CPU. Such costs were assigned to the DAS when the units involved were of a custom-built nature and to the CPU when they were [Pg 61] manufacturer's items incorporated in the computer frame. The very wide range of types of data-acquisition equipment in use necessarily contributes to the spread in DAS costs. Although a number of items of uncertain costs are lumped together in this definition of the DAS, the procedure adopted is believed to have led to a valuable overall picture of the pattern of expenditures.
| TABLE 8 Types of Computers Used in the Systems Reported | ||
| Type | Number | |
| ASI 210 | 1 | |
| ASI 2100 | 2 | (3) |
| CDC 160A | 2 | |
| CDC 3100 | 1 | (3) |
| DDP 116 | 1 | |
| DDP 124 | 1 | (2) |
| EMR 6050 | 1 | |
| EMR 6130 | 1 | (2) |
| IBM 1800 | 2 | |
| IBM 360/44 | 2 | |
| IBM 7094 | 1 | (5) |
| PDP-4 | 2 | |
| PDP-5 | 1 | |
| PDP-6 | 1 | |
| PDP-7, 7A | 6 | |
| PDP-8, 8I | 8 | (24) |
| PDP-9 | 6 | |
| SCC 660 | 1 | (1) |
| SDS SIGMA 2 | 1 | |
| SDS SIGMA 5 | 1 | |
| SDS SIGMA 7 | 2 | |
| SDS 910 | 1 | (8) |
| SDS 920 | 1 | |
| SDS 925 | 1 | |
| SDS 930 | 1 | |
| SEL 810B | 2 | |
| SEL 840A | 1 | (3) |
| Varian 620I | 2 | (2) |
| TOTAL | 53 | |
A fourth item of importance in the analysis is the cost of system software programming. This is almost entirely a manpower item, assuming that program testing and debugging can be carried out without charge for the computer time involved. Here there is considerable uncertainty in the estimates, especially with respect to university installations as well as systems which have been in operation for a long time, e.g., the large system at Argonne.
The total cost of a system is taken to be the sum of the four items listed above, namely, the CPU, the standard I/O system, the DAS, and the system software expenditures. In all likelihood the total costs tend to be too small rather than too large because of incomplete assignments of charges of various sorts, especially manpower. In many cases the totals seem reliable to 10 or 20 percent, while in a few others an error of 30 or even 40 percent would not be surprising.
Table 8 gives a listing of the 27 different types of computers incorporated in the systems reported, together with the number of units of each type mentioned. Of the 27 types, 24 are machines designed with this general sort of application in mind; the exceptional three are the CDC 160A, the CDC 3100, and the IBM 7094. Evidently, the PDP machines are the most popular (24 units), followed by SDS types (8 units), and IBM types (5 units).
Of the 46 system reports, 35 were sufficiently complete to be useful in a detailed analysis. A histogram showing the distribution of these in total cost is given in Figure 13. [Pg 62] One immediately sees that few systems cost less than $100,000; in fact only four were reported in this range. However, it must be pointed out that information was solicited regarding only those systems which had cost approximately $50,000 or more. The most common range is $100,000 to $200,000, with 12 examples. The total cost of the system at the Yale Van de Graaff laboratory was not known when the histogram was prepared, but the hardware is reported to cost about $750,000 to duplicate and about $655,000 to copy, so if allowance is made for the cost of developing the software and for other manpower uses the cost would rise substantially. (This system is not one of the 35. The conditions under which the Yale-IBM development are being carried out are so special that manpower costs cannot be assigned on the basis used in other cases. Chapter 2, Section E.)
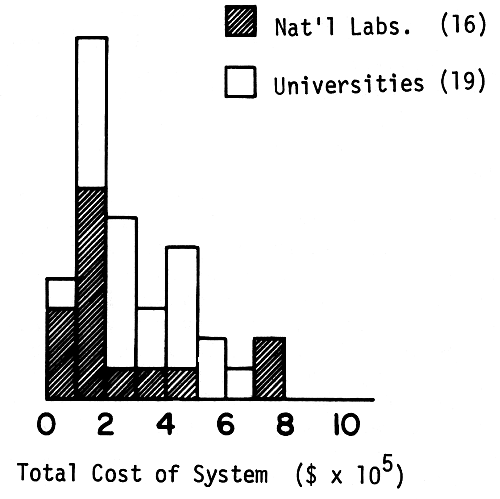
FIGURE 13 Histogram showing the distribution of 35 data-acquisition systems in total cost.
A breakdown of total costs for the 35 systems is given in Table 9, showing separately the total amounts involved in each of the four categories defined above. Evidently, about 60 percent of the cost goes for standard computer hardware, while about 40 percent goes for special hardware and software required for data acquisition. Table 10 shows separately the hardware and labor costs in the DAS item. Evidently, hardware is twice as expensive as labor in this case, on the average.
| TABLE 9 Summary from 35 "Complete" Reports | ||
| Subsystem | Cost | Percentage of Total |
| CPU's with memory and TTY | $ 3,933,000 | 38.5 |
| Standard peripherals | 2,293,000 | 22.4 |
| Data-acquisition subsystem | 3,038,000 | 30.0 |
| Systems software | 931,000 | 9.1 |
| TOTAL | $10,195,000 | 100.0 |
| TABLE 10 Data-Acquisition Subsystem | ||
| Hardware | $2,022,000 | |
| Labor | 1,016,000 | |
| TOTAL | $3,038,000 | |
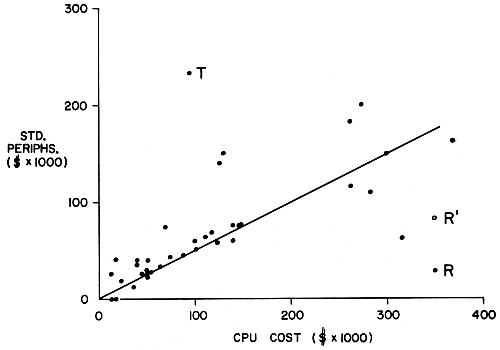
FIGURE 14 Cost of standard peripheral equipment plotted against central processor costs for 36 systems.
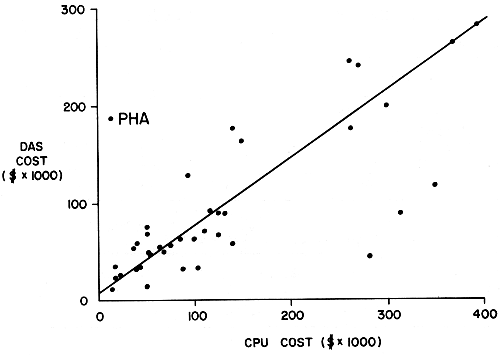
FIGURE 15 Cost of data-acquisition subsystem plotted against central processor costs for 36 systems.
In Figure 14 the cost of the standard I/O equipment is shown plotted against the cost of the CPU for 36 different systems. The high point labeled "T" represents a system having many high-speed magnetic tape drives. The low point labeled "R" represents the Rochester system, which must be considered unbalanced, because its only "standard" I/O equipment is four Dectapes, which should, perhaps, have been defined as CPU items, since they cannot be used for communication with most computing centers. If a line printer and two IBM-compatible tape units were added, the Rochester point would have to be raised at least as high as the position R'. The straight line shown in Figure 14 was drawn with a slope of one half. It may perhaps be taken to represent a rough statistical reflection of the collective experience accumulated over the past six years or so regarding the relative costs of I/O and CPU equipment. In Figure 15 DAS costs are plotted against CPU costs for the same 36 systems. Here the spread of the points is worse than [Pg 65] in the previous case, as expected for the reasons mentioned earlier. The exceptionally high point labeled "PHA" represents a system with three large pulse-height analyzers, two of them 20,000-channel units, in the DAS. The straight line shown has the equation y = 8.0 + 0.7x. The overall DAS cost is 77 percent of the total CPU cost.
One magnetic drum unit and 11 disks were reported to be in service (in eight different laboratories). Plans were reported for the installation of six more disk units and one drum (in five different laboratories). Recognition of the importance of rotating memory devices in display applications is evident in the reports.
Two systems were clearly stated to be in successful on-line operation with external computing centers. (At least one more example, at the University of Manitoba, is known: there a PDP-9 system is linked to an IBM 360/65.)
There are plans in various stages of development to connect nine different data-acquisition systems on-line with computing center machines, in most cases to operate on a delayed-access basis.
In cases where updating or enlarging of existing systems was said to be in progress, the costs reported were usually assigned by the reviewer to the present system, especially when money for the expansion seemed already available or very likely to become available. In many cases plans were in a less advanced state, but a fairly definite idea of the amount of money to be requested for expansion or for completely new systems was expressed. Table 11 summarizes these anticipated costs.
| TABLE 11 Anticipated Future Expenditures | ||
| For expansion of systems | $3,280,000 | |
| For additional systems | 1,455,000 | |
| TOTAL | $4,735,000 | |
C. V. Smith and George Rogosa have kindly made available approximate AEC budget figures for nine typical university laboratories chosen from those which had returned information in response to Dr. McDaniels' request. (The laboratories are Colorado, Kansas, Maryland, Minnesota, Texas, Wisconsin, Washington, Yale Linac, and Yale Van de Graaff.) After adding similar information for Rochester, it was possible to get a rough idea of the relative capital investments in accelerators and in computer systems and to compare those figures with the annual operating budgets (for 1969).
| total annual budget | = 0.33 | ||
| cost of bare accelerator | |||
| total computer cost | = 0.23 | ⇒ | 0.22 ± 0.06 by averaging separate ratios for each system |
| cost of bare accelerator | |||
| total computer cost | = 0.70 | ||
| total annual budget |
If the ratio of the total computer cost to the annual budget is calculated for each of the ten cases, and then the results are averaged, one gets 0.6 ± 0.3. If one quite unusual set of data (from a laboratory with a small AEC budget) is eliminated the last result becomes 0.56 ± 0.21, while the earlier results remain essentially unaltered. For the same nine examples we find that the average of the ratios of total computer system costs to bare accelerator costs is 0.22 ± 0.062, thus this ratio is significantly more consistent. It is emphasized that the results given in this paragraph refer only to experience at universities.
Tables 12 and 13 give a summary of present and anticipated process-control applications disclosed by the survey.
| TABLE 12 Current Process-Control Applications | ||
| Laboratory | Systems | |
| ANL | Van de Graaff accelerator; large scattering chamber setup; x-ray and neutron diffractometers; automatic plate scanner | |
| BNL | Neutron spectrometers; x-ray and neutron spectrometers, nine in all | |
| Michigan State | Cyclotron shim coils | |
| ORNL | Slow neutron time-of-flight to measure capture and fission cross sections | |
| Yale | Electron linac and beam optics; experiments with the linac | |
| TABLE 13 Future Process-Control Applications | ||
| Laboratory | Systems | |
| Michigan State | Control of entire accelerator system | |
| Minnesota | Tandem Van de Graaff accelerator and beam transport system | |
| Stanford | Nuclear reaction experiments | |
| UCLA | Limited control of cyclotron | |
The ultimate justification for assembling and using on-line data-acquisition systems must be made in terms of research output. The same considerations underlying judgments on the support of experimental research in other ways must therefore apply to computer systems. Some reasons often given for the use of on-line computer systems are these:
1. Modern experiments produce vast quantities of data which can be handled efficiently only by automatic calculating machinery. The experimenter gains greatly in effectiveness when the data are immediately converted into machine language, reduced by the computer, and presented to the experimenter in a convenient form.
Comment: Undoubtedly true. Fortunately a small system can satisfy this requirement in many cases.
2. Some experiments "cannot" be done by other means.
Comment: More likely true in practice than in principle.
3. Investment in a computer system is sometimes sound because it leads to a net reduction in the overall cost of performing experiments, either by eliminating some of the labor cost, by reducing the consumption of accelerator time, or in some other way.
Comment: True in many cases. Making estimates of projected savings is easier in ad hoc cases than in general.
4. Having facilities immediately accessible for calculating nuclear-reaction kinematics, magnetic analyzer field strengths, and other phenomena during the course of experiments saves time and promotes efficiency.
Comment: True, however, much of this work can be done ahead of time, and much of it requires only a relatively short, simple calculation which can be executed on a medium-sized computer, sometimes on a small one.
5. Given a sufficiently large computer system in the laboratory, its use for complicated data reduction and for [Pg 69] theoretical calculations may produce an important saving of funds which might otherwise have been spent at the computing center.
Comment: This point may sometimes be valid, depending on a number of conditions, but the installation of a large computer as part of the data-acquisition system essentially on the basis of this argument is questionable, in view of the excellent facilities offered by modern computing centers.
6. Some expense for the development of computer systems and computer systems methods is justifiable as an investment in methodology.
Comment: True, although there is some question about the choice of places where such work should be done and about the correct source of funds to support it.
At the very outset of planning one should examine very closely the question of the large-scale calculating required in the overall execution of the research program of the laboratory; then, if, as usual, it turns out that a substantial amount of complex calculating is anticipated, one should consider carefully the feasibility of planning to do that part of the work at the most readily accessible computer center in the vicinity, so as to be able to concentrate one's own energies and resources, especially capital investment, on the data-acquisition system. The use of a modern computer center offers enormous advantages, and most computing centers would welcome support. If this course of action is chosen, provisions must be planned from the start for computer-language communication between the computer center and the nuclear research laboratory via a medium such as magnetic tape. (Direct wire transmission will often not prove feasible.)
Some key questions are:
1. How much large-scale computing is anticipated?
2. How much waiting time for results is tolerable?
3. Can the local computing center handle the needs, and at what cost?
4. If the local computing center can handle all the needs, but only after acquiring certain additional support for equipment or manpower, might not the better course of action be to provide that support rather than to set up separate facilities?
5. Can setting up a large system truly be justified? Have all the extra costs and complexities of the large system been taken into account, including those associated with input and output devices, operation, maintenance, programming, management, and space?
Since the ultimate criterion is research output, the role assigned to a computer system must depend on the nature of the work being planned. In some cases where a very specific use is intended, for example, in the case of a process-control application such as the Argonne plate scanner or an accelerator controller, the conditions are simple enough to make economic judgment relatively easy to apply. In the case encountered in setting up an accelerator laboratory where a wide variety of experiments is to be performed, conditions are much more complex. It is now widely accepted that any such laboratory should have a computer system, but what is not so clear is how extensive and expensive it should be. In other words, points 1-4 in B are accepted, and point 5 is conceded possibly to be applicable.
If sufficient funds are available, one sensible way to proceed is to use the accumulated collective experience outlined above. For example, one can say that experience has shown that the total investment in the computer system will be in reasonable balance with the capital investment in the bare accelerator if the ratio of costs is about one to five. Departures from the rule may then be made to adjust to special circumstances. Following this procedure means extrapolating from past experience, which may not prove a good guide, but this approach is similar to that often used in other matters bearing on the support of research. Probability is involved. It should be noted that the actual expenditures for on-line equipment for nuclear research have far exceeded those projected at the "Grossinger Conference on the Utilization of Multiparameter Analyzers in Nuclear Physics" in 1962.
In times of economic stringency it may be necessary to take a hard look at points 3-5 in B above before deciding how large a computer can be justified. A medium-sized computer is sufficient for most data-acquisition demands but not for large-scale calculations of a theoretical nature or for an [Pg 71] occasional complicated piece of data reduction. Often it will be advisable to plan on carrying out all large calculations at the computing center, in which case a medium-sized computer will probably suffice for data acquisition, and a saving of about half in capital investment and operating expenses can be achieved.
If economic realities and good judgment should dictate the choice of a smaller system, the laboratory will still be well off. There is a tendency not to recognize the full capabilities of modern medium-sized and small computers, which, given intelligent programming, are very powerful. Although programming is in general expensive, the return for a modest amount of it in terms of data-acquisition performance may be very impressive. For example, the use of tables calculated ahead of time, stored on magnetic tape at the computing center, and read into the data-acquisition machine along with its control program offers a way to bypass the need for various sorts of calculations which might have been done on-line on a larger system. Increased efficiency of data acquisition often comes from the use of such methods, reflected in increased data-handling rates.
The system planner should try to anticipate a possible future expansion. In the case of a cut-and-dried process-control application it will often be safe to assume that the system will not have to grow, but recent history shows that in the case of general-purpose systems growth is the rule. In fact, systems have sometimes had to be replaced by entirely new ones. The system planner must beware of pitfalls. If, in anticipation of a greater future need, a much larger CPU is ordered than current use demands, the anticipated need may not develop. Or, if it happens that the money initially available for capital investment is so limited that it is all exhausted in buying the CPU, leaving the system badly short of conventional I/O equipment, then the system will remain [Pg 72] painfully unbalanced until substantial additional funds appear. If those funds do not appear, the capability of the system will remain far less than the presence of the large CPU would suggest. (This is what happened at Rochester, where three years after the system was installed there is still no card reader, line printer, or conventional magnetic tape drive system; in fact, there is no computer-language medium for communication with the University of Rochester Computing Center.)
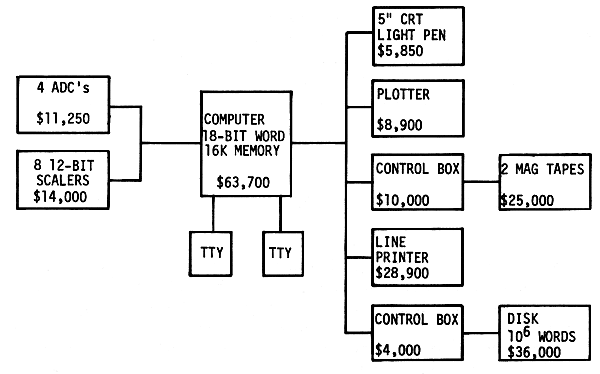
FIGURE 16 A data-acquisition system based on a medium-sized computer. Prices are actual costs for equipment supplied by a well-known manufacturer. This system is powerful enough to satisfy most data-acquisition needs at a typical low-energy accelerator laboratory.
The correct strategy to employ in every case should be consistent with the size of the laboratory and with the capabilities of its staff. A laboratory with a small engineering staff and with modest computing needs for the immediate future should certainly not plan to set up a large system. Instead it could sensibly begin with a manufacturer-assembled, trimmed-down version of the Comparison System (Figure 16), which could be enlarged later as occasion demanded and funds permitted.
It is no longer necessary to develop one's own system. Times have changed greatly. Many systems now exist which work well and are worth copying. Manufacturers and suppliers are prepared to deliver entire systems assembled and ready to operate, complete with all the necessary system software and varying amounts of utility software. Although it may at first sight seem more economical to assemble a system within the laboratory, by use of laboratory personnel, in most cases it is now better to buy the system from a single supplier, completely installed and operable, saving one's own resources for matters more directly concerned with research. The costs in time and effort to develop a new computer system have been much larger than predicted, in almost every case known to the authors. Large laboratories having strong engineering staffs are an exception; outside of industrial plants they are the places where new system development and assembly makes the most sense.
In general it is best to plan to do all very large-scale computing jobs (e.g., shell model and scattering theory calculations) at a large computing center and to set up in the laboratory a system which is just large enough to handle comfortably the data-acquisition jobs. Usually a medium-sized or small system will suffice. However, in some circumstances this will not be true.
Direct transmission-line coupling to a large, remote computing center may prove practical for handling occasional low-priority bursts of data processing, for example, when one can be satisfied with guaranteed access within about 100 µsec, say, and a maximum guaranteed total access duration of no more than a few percent of any day. Such a hookup may also be valuable for the handling of data input and output in the [Pg 74] remote batch mode of operation, especially if a card reader (or high-speed paper tape or storage device) and a line printer are available for this use, in the laboratory. However, there are few if any examples of successful high-priority prompt-interrupt operation. One should be extremely skeptical about the feasibility of relying on this last mode of operation.
Rental rates have typically been set so that if the anticipated use period exceeds about three years, economic prudence suggests purchasing a computer rather than renting, providing that the necessary funds for capital investment are available. This can only be true, of course, because the life expectancy of modern computers is quite long, certainly over five years. (Also, one hesitates to trade in an old computer for which an excellent software collection exists!) The argument against renting standard peripherals is weaker, because they are electromechanical in nature and therefore have shorter lifetimes; furthermore, they tend to become outmoded. Renting can be especially attractive in special circumstances. For example, a line printer can be rented for the early period of operation of a system, while extensive program development work is in progress, and returned later, when the work has been finished.
Computers are rapidly getting better and cheaper. This month's machine is much more powerful than last month's, dollar for dollar. New machines will always be appealing, but the prospective purchaser must balance their appeal against considerations of probable delivery date, software availability, completeness of documentation for both software and hardware, and in general the manufacturer's support capability. Unfortunately, these factors usually weigh against a new machine. As a rule, even a medium-sized system based on a new model machine will not be in full operation for approximately one year after delivery, unless both the hardware and the software have been tried and proven in a previous installation. On the other hand, in the case of an older model the same factors may all be favorable, but now the machine probably gives less [Pg 75] computing per dollar, and the advantage of an early return on the investment must be weighed carefully against the likelihood of somewhat earlier obsolescence. At some time during the life of a computer the manufacturer will very likely cease to support its software and, usually later, its hardware.
Software is all-important, and it is very expensive to develop, both in time and money; hence a system planner should favor a central processor for which a large amount of software is supplied by the manufacturer, especially system software. In general, when a particular type of machine has already been delivered to many customers the manufacturer may be relied upon to supply the essential software needed to run a system: an assembler, I/O routines for standard devices, and usually a Fortran compiler. The larger machines will be supplied with some sort of operating system (monitor), either for batch or time-shared operation. However, the specialized software needed for data acquisition will usually not be available unless it has already been developed by another user. A laboratory with limited programming resources should therefore give great weight to obtaining a system already provided with all essential software and should direct its own programming efforts to specific data-acquisition problems. Contracting with an outside company for development of the specialized software is also possible, although the cost will probably exceed the salaries of in-house personnel hired to do the same job, and communication with an outside group is inconvenient.
Many small, powerful computers are now on the market. They are inexpensive but very reliable. For many data-taking purposes they are quite sufficient, when equipped with appropriate peripheral devices and an adequate program library.
Magnetic disk and drum bulk storage devices have also undergone much development recently. Many good, small versions are now on the market at rather low prices. The capabilities of these units must not be overlooked. Attaching a modern disk unit to a modern, small or medium-sized computer produces a powerful but economical combination.
Unless an appropriate set of standard input-output devices is provided, the computer will not be used efficiently. A balanced system with a small computer is likely to prove much more useful than an unbalanced system with a medium-sized computer. What is necessary will, of course, depend upon the uses of the system. For example, if a large amount of program development is anticipated, the inclusion of a line printer should certainly be considered, because universal experience has shown that line printers are immensely valuable during program development; on the other hand, as a rule they are not so important in most data-taking operations.
It is often cheaper initially to use peripheral devices from a separate manufacturer, with interfacing provided either by the user or by an outside commercial firm. In this case difficulties lie in guessing the reliability of the devices and in achieving software compatibility. Software developed by a computer manufacturer usually takes advantage of the peculiarities of his own peripherals. If an outside device is purchased, the additional cost for programming during the lifetime of the system should be considered. If competent engineering effort is available, an interface compatible with the computer manufacturer's software may be built, with a possible saving in programming cost.
Standardized input-output bus structures designed to simplify interfacing to computers have recently been developed. Conspicuous among them is the CAMAC system already accepted as standard in many European laboratories. It is now being introduced into a few American laboratories. Before it can be accepted as a standard system here, a number of questions must be answered. For example, what types of external devices should be interfaced in this way, just ADC's data registers, counters, and the like, or should line printers, card readers, and related devices be included? Also, how much trouble will be encountered with manufacturers' I/O software, and how much will any necessary rewriting cost? Also will all computer I/O structures lend themselves to such a system; specifically, are multiport systems suitable? A national committee is now studying the CAMAC system to see if it, or something similar, should be recommended as standard in the United States. Even after being recommended as standard, however, any such system cannot be considered successful unless manufacturers accept it and market a wide variety of compatible devices. From the manufacturer's point of view the risks here may seem considerably greater than they were in the case of the NIM bins. It seems wise to keep watching for the outcome of this interesting development.
Whenever a new type of device is interfaced to a system, some form of machine-language programming must almost always be done in order to permit the handling of input-output operations involving the new device. This is true even in places such as Yale, where the design emphasizes a maximum use of Fortran. For this and other reasons, there should be at least one person on call who is skilled in machine-language programming and who understands the system.
The manpower required to maintain the hardware and software of any system naturally depends on the size of the installation and the uses to which it is put. Typically, a continuing [Pg 78] effort must be expended on the improvement of system software and the writing of new data-acquisition programs. The existing hardware must be given preventive maintenance and repairs. Furthermore from time to time a hardware change must be made. Also, there are administrative matters; even the smallest system should have within the laboratory at least one person who will devote a large part of his time to administration, to the education of users, and to related matters. In many cases the laboratory has a contract with an outside firm, often the computer manufacturer, for maintenance of the computer, and sometimes the rest of the system as well. In other cases all or part of this work is done by laboratory personnel. Sometimes several laboratory people are competent both in machine-language programming and in diagnosing and repairing hardware ills. Such people are very valuable, especially if they are also competent to do interfacing of new devices. In some cases the experimenters do much of their own data-acquisition programming, in others essentially all programming is done by professionals. In some university laboratories much use is made of part-time student programmers, of whom there is now a considerable supply because of the growth of education in programming, both in high schools and at colleges. Students are sometimes remarkably good at this work and stand to profit later from the experience, but they are transients, and effort expended in training them is lost when they leave. Very roughly speaking, a small system will require a good fraction of the time of a technician-programmer, a medium system will require at least one full-time technician-programmer, and a full-time programmer, or some equivalent combination, assuming an active research program.
The comprehensive tables of properties of small and medium-sized computers appearing on the next 6 pages are from D. J. Theis and L. C. Hobbs, "Mini-Computers for Real-Time Applications," Datamation, Vol. 15, No. 3, p. 39 (March 1969) and are reprinted here by permission of the publisher, F. D. Thompson Publications, Inc., 35 Mason Street, Greenwich, Conn. 06830.
| MANUFACTURER / MODEL NUMBER |
Digital Equipment Corp. PDP-9 |
Digital Equipment Corp. PDP-9/L |
Computer Automation PDC-816 |
ControlData Corporation 1700 |
Data General Nova |
DataMate Computer Systems, Inc. Data Mate-16 |
Decade Computer Corp. 70/2 |
Electronic Assoc. Inc. 640 |
EMR 6130 |
Hewlett Packard 2114A |
Hewlett Packard 2115A |
Hewlett Packard 2116B |
Honeywell DDP-416 |
| MEMORY | |||||||||||||
| Memory cycle time (µs) | 1.0 | 1.5 | 8 | 1.1 | 2.6 | 1.0 | .860 | 1.65 | 0.775 | 2.0 | 2.0 | 1.6 | 0.96 |
| Memory word length (bits) | 18 | 18 | 16 | 18 | 16 | 16 | 18 | 16 | 18 | 16 | 16 | 16 | 16 |
| Minimum memory size (words) | 8K | 4K | 4K | 4K | 1K | 4K | 4K | 4K | 8K | 4K | 4K | 8K | 4K |
| Memory increment size (words) | 8K | 4K | 4K | 4K | 1K,2K,4K | 4K | 4K | 4K | 8K | 4K | 4K | 8K | 4K |
| Maximum memory size (words) | 32K | 16K | 16K | 32K | 32K | 32K | 16K | 32K | 32K | 8K | 8K | 32K | 16K |
| Parity check (std.,opt.,no) | opt. | opt. | no | std. | no | opt. | std. | no | std. | opt. | opt. | opt. | opt. |
| Memory protect (std.,opt.,no) | opt. | opt. | no | std. | no | std. | std. | std. | std. | no | opt. | opt. | opt. |
| CPU FEATURES | |||||||||||||
| Instruction word length(s) | 18 | 18 | 16 | 16/32 | 16 | 16 | 16/32 | 16/32 | 16/32 | 16 | 16 | 16 | 16/32 |
| Number of accumulators (or general purpose registers that can be used as accumulators) | 1 std. 1 opt. |
1 std. 1 opt. |
1 | 2 | 4 | 2 | 1 | 2 | 2 | 2 | 2 | 2 | 1 |
| Number of hardware registers (not including index registers) | 1 std. 1 opt. |
1 std. 1 opt. |
6 | 8 | 10 | 6 | 5 | 9 | 4 | 7 | 7 | 7 | 4 |
| Number of index registers (indicate whether they are hardware, memory or other techniques) | 7 (auto. index mem. reg.) | 7 (auto. index mem. reg.) | 1 hardware | 1 hardware 1 memory |
2 hardware 16 memory |
1 hardware | 1 memory | 1 hardware | 3 hardware | none | none | none | none |
| How many bits for operation code | 4 | 4 | 5 | 4 | 5 | 5 | 6 | 4 | 5 | 4 | 4 | 4 | 6 |
| How many bits for address modes | 1 | 1 | 3 | 4 | 3 | 3 | 3 | 3 | 3 | 2 | 2 | 2 | 1 |
| Number of addressing modes | 2 | 2 | 8 | 7 | 8 | 8 | 5 | 3-8 | 7 | 4 | 4 | 4 | 2 |
| How many bits for address | 13 | 13 | 8 | 8/15 | 8 | 8 | 7/14 | 9/15 | 8/15 | 10 | 10 | 10 | 9/14 |
| In this machine one can directly address ____ words | 8,192 | 4,096 | 768 | 256 | 1,024 | 256 | 16,384 | 512 | 32,768 | 2,048 | 2,048 | 2,048 | 1,024 |
| in ____ µs | 2.0 | 3.0 | 16.0 | 1.1 | 5.2 | 2.0 | 1.9 | 1.65 | 1.9 | 2.0 | 2.0 | 1.6 | 0.96 |
| and indirectly address ____ words | 32K | 16K | 16K | 32K | 32K | 32K | 16K | 32K | 32K | 8K | 8K | 32K | 16K |
| in ____ µs | 3.0 | 4.5 | 24.0 | 3.3 | 7.8 | 3.0 | 1.9 | 3.3 | 2.9 | 4.0 | 4.0 | 3.2 | 1.92 |
| Indirect addressing (multi-level, single-level, no) | Single-level | Single-level | Multi-level | Multi-level | Multi-level | Multi-level | Single-level | Multi-level | Multi-level | Multi-level | Multi-level | Multi-level | Multi-level |
| ARITHMETIC OPERATIONS | |||||||||||||
| Store time for full word (µs) | 2.0 | 3.0 | 16.0 | 2.2 | 5.5 | 2.0 | 1.9 | 3.3 | 1.9 | 4.0 | 4.0 | 3.2 | 1.92 |
| Add time for full word (µs) | 2.0 | 3.0 | 16.0 | 2.2 | 5.9 | 2.0 | 1.9 | 3.3 | 1.9 | 4.0 | 4.0 | 3.2 | 1.92 |
| Fixed-point hardware mult/divide (std., opt., no) | opt. | opt. | no | std. | no | std. | opt. | std. | std. | no | opt. | opt. | no |
| Multiply time hardware (µs) | 3.0-11.0 | 4.5-16.5 | — | 7 | — | 6.0 | 6.5 | 18.15 | 4.5-8.3 | 24.0 | 19.2 | ||
| Divide time hardware (µs) | 3.0-12.0 | 4.5-18.0 | — | 9 | — | 7.0 | 12.5 | 18.975 | 7.9-11.4 | 26.0 | 20.8 | ||
| Multiply time software (µs) | 281 max. | 421 max. | 102 | — | 329.3-334.1 | N/A | 187 | 187 | 150 | 154.6 | |||
| Divide time software (µs) | 352 max. | 528 max. | 178 | — | 424.8-519.2 | N/A | 387 | 387 | 310 | 220.8 | |||
| I/O CAPABILITY | |||||||||||||
| Data path width (bits) | 18 | 18 | 8/16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 |
| Direct memory access (DMA) channel (std., opt., no) | std. | no | std. | opt. | std. | opt. | opt. | opt. | std. | no | opt. | opt. | opt. |
| Maximum DMA word transfer rate | 1.0 MHZ |
— | 125 KHZ |
900 KHZ |
312 KHZ |
1.0 MHZ |
1.1 MHZ |
600 KHZ |
1.26 MHZ |
— | 500 KHZ |
625 KHZ |
1.0 MHZ |
| Number of external priority interrupt levels provided in basic system | 1 | 1 | 3 | 16 | 16 | 8 | 1 | 7 | none | 8 | 8 | 16 | 2 |
| Maximum number of external interrupts | 256 | 256 | 256 | 16 | 62 | 64 | 32 | 64 | 126 | 56 | 40 | 48 | 48 |
| Response time (µs) including time to save registers of interrupted program and initiate new program execution | 4.0 | 6.0 | 48.0 | 50.0 | 38.6 | 5.0 | 8.0 | 5.8 | 13.2 | 10.0 | 10.0 | 8.0 | 4.8 |
| OTHER FEATURES | |||||||||||||
| Power failure protect (std., opt., no) | opt. | opt. | opt. | std. | std. | std. | opt. | std. | std. | opt. | opt. | std. | std. |
| [Pg 81]Automatic restart after power failure (std., opt., no) | opt. | opt. | opt. | opt. | opt. | std. | opt. | no | opt. | opt. | opt. | opt. | opt. |
| Real-time clock or internal timer (std., opt., no) | std. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. |
| SOFTWARE | |||||||||||||
| Assembler (1 pass, 2 pass, both) | 2 pass | 2 pass | 2 pass | 2 pass | 2 pass | 2 pass | 1 pass | 2 pass | both | 2 pass | 2 pass | 2 pass | both |
| Relocatable assembler (yes, no) | yes | yes | yes | yes | no | yes | yes | yes | yes | yes | yes | yes | no |
| Minimum core size necessary to use this relocatable assembler | 8K | 4K | 4K | 4K | — | 4K | 4K | 8K | 8K | 4K | 4K | 4K | — |
| Macro assembler capability | yes | yes | no | yes | no | yes | no | no | yes | no | no | no | no |
| Compilers available (specify explicitly, e.g., Fortran II, IV, ASA Basic Fortran, etc.) | Fortran IV | Fortran IV | none | ASA Basic Fortran | none | none | Fortran IV | Fortran IV | ASA Basic Fortran Fortran IV |
Algol, ASA Basic Fortran | Algol, ASA Basic Fortran | Algol, ASA Basic Fortran | none |
| Conversational compilers (e.g., FOCAL, BASIC, CAL, etc.) | FOCAL | none | none | none | none | none | CHAT | DOI | none | BASIC | BASIC | BASIC | none |
| Real-time executive monitor available (yes, no) | yes | yes | no | yes | no | no | no | no | yes | no | no | yes | no |
| Disc operating system available (yes, no) | yes | yes | no | yes | no | no | no | yes | yes | no | yes | yes | yes |
| BASIC MAINFRAME COSTS | |||||||||||||
| Basic system price with 4K words including power supplies | N/A | $19,000 | $11,900 | $29,000 | $ 7,600 | $13,900 | $12,800 | $26,500 | N/A | $ 9,950 | $14,500 | N/A | $15,700 |
| Price of ASR-33 Teletype (if not already included in Basic System Price) | — | $ 900 | $ 1,900 | $ 6,000 (ASR-35) |
$ 1,400 | $ 2,000 | $ 1,200 | $ 1,200 | — | $ 2,000 | $ 2,000 | — | $ 1,200 |
| Total system price, including ASR-33 Teletype and CPU | — | $19,900 | $13,800 | $35,000 (ASR-35) |
$ 9,000 | $15,900 | $14,000 | $27,700 | — | $11,950 | $16,500 | — | $16,900 |
| Basic system price with 8K words including adequate power supplies, enclosure, control panel | $35,000 | $25,000 | $17,900 | $37,000 | $10,885 | $20,400 | $18,600 | $35,500 | $46,000 | $13,950 | $19,500 | $24,000 | $23,700 |
| Price of ASR-33 Teletype (if not already included in Basic System Price) | Included | $ 900 | $ 1,900 | $ 6,000 (ASR-35) |
$ 1,400 | $ 2,000 | $ 1,200 | $ 1,200 | $ 3,100 | $ 2,000 | $ 2,000 | $ 2,000 | $ 1,200 |
| Total system price, including ASR-33 Teletype and CPU | $35,000 | $25,900 | $19,800 | $43,000 (ASR-35) |
$12,285 | $22,400 | $19,800 | $36,700 | $49,100 | $15,950 | $21,500 | $26,000 | $24,900 |
| PERIPHERALS AVAILABLE | |||||||||||||
| Magnetic tape available (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Approximate price for operational unit (including controller, computer options necessary, etc.) | $22,000 to $23,000 |
$22,000 to $23,000 |
$ 5,700 to $10,000 |
$22,500 | $12,000 | $19,500 | $12,000 | $30,000 to $32,000 |
$35,200 to $67,200 |
$12,500 to $15,000 |
$15,500 to $21,500 |
$15,500 to $21,500 |
$23,355 to $35,430 |
| Mass storage device available (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | no | yes | yes | yes |
| Approximate price of operational unit (including controller, computer options necessary, etc.) | $ 9,750 | $ 9,750 | $ 6,500 to $ 9,950 |
$27,500 | $ 6,500 to $ 9,250 |
$18,000 to $45,000 |
$15,000 | $24,500 | $20,200 to $54,700 |
— | $26,500 to $31,500 |
$26,500 to $31,500 |
$22,300 to $36,000 |
| High speed paper tape reader (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Speed (char/sec) | 300 | 300 | 300 | 350 | 300/150 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 |
| Approximate price of operational unit | Included | Combination $ 4,800 |
$ 2,200 | $ 4,500 | $2,650/ $2,150 |
$ 2,000 | $ 2,500 | Combination $ 8,400 |
Combination $10,100 |
$ 2,100 | $ 2,100 | $ 2,100 | $ 3,800 |
| High speed paper tape punch (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Speed (char/sec) | 50 | 50 | 60 | 120 | 63.3 | 120 | 120 | 120 | 60 | 120 | 120 | 120 | 110 |
| Approximate price of operational unit | Included | Combination $ 4,800 |
$ 3,300 | $ 5,100 | $ 2,200 | $ 4,000 | $ 4,000 | Combination $ 8,400 |
Combination $10,100 |
$ 4,100 | $ 4,100 | $ 4,100 | $ 4,500 |
| NOTE: N/A = Not Announced—or Not Available | |||||||||||||
| MANUFACTURER / MODEL NUMBER |
Honeywell DDP-516 |
Information Technolgy,Inc. ITI-4900 (Model 20) |
Interdata Model 3 |
Interdata Model 4 |
IBM 1130 |
IBM 1800 |
Lockheed Electronics MAC-16 |
Raytheon 703 |
Raytheon 706 |
Scientific Control Corp. 4700 |
Scientific Data Systems Sigma2 |
Systems Engineering Laboratories 810A |
Systems Engineering Laboratories 810B |
| MEMORY | |||||||||||||
| Memory cycle time (µs) | 0.96 | 0.975/1.75 | 0.980/1.5 | 0.980/1.5 | 2.2/3.6 | 2/4 | 1 | 1.75 | 0.9 | 0.920 | 0.9 | 1.75 | .756 |
| Memory word length (bits) | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 | 16 |
| Minimum memory size (words) | 4K | 4K | 2K | 2K | 4K | 4K | 4K | 4K | 4K | 4K | 8K | 4K | 8K |
| Memory increment size (words) | 4K | 4K | 2K,4K | 2K,4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 8K |
| Maximum memory size (words) | 32K | 32K | 32K | 32K | 32K | 32K | 65K | 32K | 32K | 65K | 65K | 32K | 32K |
| Parity check (std.,opt.,no) | opt. | opt. | opt. | opt. | std. | std. | opt. | no | opt. | opt. | std. | opt. | std. |
| Memory protect (std.,opt.,no) | opt. | opt. | opt. | opt. | no | std. | opt. | no | opt. | opt. | opt. | opt. | opt. |
| CPU FEATURES | |||||||||||||
| Instruction word length(s) | 16/32 | 16/32 | 16/32 | 16/32 | 16/32 | 16/32 | 16 | 16 | 16 | 16/32 | 16 | 16 | 16 |
| Number of accumulators (or general purpose registers that can be used as accumulators) | 2 | 8 | 16 | 16 | 2 | 2 | 1 | 1 | 1 | 3 | 2 | 2 | 2 |
| Number of hardware registers (not including index registers) | 5 | 16 | 18 | 33 | 7 | 7 | 6 | 6 | 6 | 10 | 6 | 2 | 2 |
| Number of index registers (indicate whether they are hardware, memory or other techniques) | 1 hardware |
6 hardware |
15 | 15 | 3 memory |
3 hardware |
4 memory |
1 hardware |
1 hardware |
1 hardware |
2 hardware |
1 hardware |
2 hardware |
| How many bits for operation code | 5 | 8 | 8 | 8 | 5 | 5 | 4 | 4 | 4 | 4/9 | 4 | 4 | 4 |
| How many bits for address modes | 2 | 2 | 2 | 2 | 2 | 2 | 3 | 1 | 1 | 3 | 4 | 2 | 2 |
| Number of addressing modes | 4 | 4 | 3 | 3 | 3 | 3 | 8 | 2 | 2 | 5 | 16 | 4 | 4 |
| How many bits for address | 9/14 | 6/16 | 6/16 | 6/16 | 9/16 | 9/16 | 9 | 11 | 11 | 9/16 | 8 | 10 | 10 |
| In this machine one can directly address ____ words | 1,024 | 32,768 | 32,768 | 32,768 | 32,768 | 32,768 | 512 | 32,768 | 32,768 | 32,768 | 1,024 | 1,024 | 1,024 |
| in ____ µs | 0.96 | 0.975/1.75 | 0.98/1.5 | 0.98/1.5 | 2.2 | 2.0 | 2.0 | 3.5 | 1.8 | 0.92 | 0.9 | 1.75 | 0.750 |
| and indirectly address ____ words | 32K | 32K | — | — | 32K | 32K | 65K | — | — | 65K | 65K | 32K | 32K |
| in ____ µs | 1.92 | 1.95/3.5 | — | — | 2.2 | 2.0 | 3.0 | — | — | 1.84 | 1.8 | 3.5 | 1.5 |
| Indirect addressing (multi-level, single-level, no) | Multi- level |
Multi- level |
no | no | Single- level |
Single- level |
Multi- level |
no | no | Single- level |
Single- level |
Multi- level |
Multi- level |
| ARITHMETIC OPERATIONS | |||||||||||||
| Store time for full word (µs) | 1.92 | 1.95/3.5 | 6.0 | 6.0 | 4.64 | 4.25 | 2.0 | 3.5 | 1.8 | 1.84 | 2.2 | 3.5 | 1.50 |
| Add time for full word (µs) | 1.92 | 1.95/3.5 | 3.2 | 3.2 | 4.88 | 4.25 | 2.0 | 3.5 | 1.8 | 1.84 | 2.2 | 3.5 | 1.50 |
| Fixed-point hardware mult/divide (std.,opt.,no) | opt. | opt. | opt. | opt. | std. | std. | opt. | opt. | opt. | opt. | opt. | std. | std. |
| Multiply time hardware (µs) | 5.28 | 10 | 23 | 23 | 15.67 | 15.25 | 9 | 12.25- 17.5 |
6.3 to 9.0 |
6.44 | 10.3 | 7 | 4.5 |
| Divide time hardware (µs) | 10.00 | 25 | 38 | 38 | 46.36 | 42.75 | 12 | 24.0 | 9.0 | 6.90 | 10.8 | 10.5 | 8.25 |
| Multiply time software (µs) | 154.6 | 50 | 900 | 900 | — | — | 150 | 147 | 75 | — | 103 | — | — |
| Divide time software (µs) | 220.8 | 100 | 1,020 | 1,020 | — | — | 300 | 299.25 | 154 | — | 297 | — | — |
| I/O CAPABILITY | |||||||||||||
| Data path width (bits) | 16 | 16 | 8 | 8 | 16 | 16 | 16 | 16 | 16 | 8/16 | 8 | 16 | 16 |
| Direct memory access (DMA) channel (std.,opt.,no) | opt. | opt. | opt. | opt. | std. | std. | opt. | opt. | opt. | opt. | std. | opt. | opt. |
| Maximum DMA word transfer rate | 1.0 MHZ |
1.0 MHZ |
450 KHZ |
450 KHZ |
460 KHZ |
500 KHZ |
800 KHZ |
571 KHZ |
1.1 MHZ |
1.1 MHZ |
200 KHZ |
572 KHZ |
1.33 MHZ |
| Number of external priority interrupt levels provided in basic system | 2 | 8 | 2 | 2 | 6 | 12 | 4 | 1 | 1 | 2 | 2 | 3 | 3 |
| Maximum number of external interrupts | 48 | 256 | 255 | 255 | 96 | 384 | 64 | 16 | 16 | 256 | 132 | 96 | 96 |
| Response time (µs) including time to save registers of interrupted program and initiate new program execution | 9.6 | 5.0 | 9.0- 16.0 |
9.0- 16.0 |
100.0 | 100.0 | 6.0 | 5.25 | 2.7 | 7.36 | 6.0 | 10.5 | 6.75 |
| OTHER FEATURES | |||||||||||||
| Power failure protect (std., opt., no) | std. | opt. | opt. | opt. | no | opt. | opt. | opt. | opt. | std. | opt. | std. | std. |
| [Pg 83]Automatic restart after power failure (std.,opt.,no) | opt. | opt. | opt. | opt. | no | opt. | opt. | std. | std. | opt. | opt. | opt. | opt. |
| Real-time clock or internal timer (std., opt., no) | opt. | opt. | opt. | opt. | no | std. | opt. | opt. | opt. | opt. | opt. | opt. | opt. |
| SOFTWARE | |||||||||||||
| Assembler (1 pass, 2 pass, both) | both | 1 pass | both | both | 2 pass | 2 pass | 2 pass | both | both | 2 pass | 2 pass | 2 pass | 2 pass |
| Relocatable assembler (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Minimum core size necessary to use this relocatable assembler | N/A | 4K | 4K | 4K | 4K | 4K | 4K | 8K | 8K | 4K | 8K | 8K | 8K |
| Macro assembler capability | no | yes | no | no | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Compilers available (specify explicitly, e.g., Fortran II, IV, ASA Basic Fortran, etc.) | Fortran IV | Fortran IV | none | none | ASA Basic Extended Fortran |
ASA Basic Extended Fortran |
ASA Standard Fortran IV |
FortranIV Fortran ASA Basic |
FortranIV Fortran ASA Basic |
FortranIV Fortran ASA Basic |
FortranIV Fortran ASA Basic |
Fortran IV | Fortran IV |
| Conversational compilers (e.g., FOCAL, BASIC, CAL, etc.) | FortranIV BASIC |
none | Fortran | Fortran | APL | none | none | none | none | none | none | none | none |
| Real-time executive monitor available (yes, no) | yes | yes | no | no | no | yes | no | yes | yes | yes | yes | no | yes |
| Disc operating system available (yes, no) | yes | no | no | no | yes | yes | no | yes | yes | yes | yes | yes | yes |
| BASIC MAINFRAME COSTS | |||||||||||||
| Basic system price with 4K words including power supplies | $23,800 | $9,950 | $10,800 | $13,800 | $25,880 | $47,300 | $11,950 | $15,000 | $19,000 | $14,800 | N/A | $18,000 | N/A |
| Price of ASR-33 Teletype (if not already included in Basic System Price) | $1,200 | $2,500 | $1,900 | $1,900 | Included | $2,930 | Included | Included | Included | $1,700 | — | Included | — |
| Total system price, including ASR-33 Teletype and CPU | $25,000 | $12,450 | $12,700 | $15,700 | $25,880 | $50,230 | $11,950 | $15,000 | $19,000 | $16,500 | — | $18,000 | — |
| Basic system price with 8K words including adequate power supplies, enclosure, control panel | $31,800 | $15,950 | $17,700 | $20,700 | $34,040 | $55,700 | $15,900 | $23,000 | $24,600 | $22,300 | $34,000 | $23,000 | $30,000 |
| Price of ASR-33 Teletype (if not already included in Basic System Price) | Included | $1,200 | $2,500 | $1,900 | $1,900 | Included | $2,930 | Included | Included | $1,700 (ASR-35) |
Included | Included | Included |
| Total system price, including ASR-33 Teletype and CPU | $33,000 | $18,450 | $19,600 | $22,600 | $34,030 | $58,630 | $15,900 | $23,000 | $24,600 | $24,000 | $41,000 (ASR-35) |
$23,000 | $30,000 |
| PERIPHERALS AVAILABLE | |||||||||||||
| Magnetic tape available (yes, no) | yes | yes | yes | yes | no | yes | yes | yes | yes | yes | yes | yes | yes |
| Approximate price for operational unit (including controller, computer options necessary, etc.) | $23,355 to $35,430 |
$18,000 | $9,900 | $9,900 | — | $15,620 | N/A | $10,500 to $28,000 |
$10,500 to $28,000 |
$24,000 | $25,000 | $24,000 | $24,000 |
| Mass storage device available (yes, no) | yes | N/A | yes | yes | yes | yes | no | yes | yes | yes | yes | yes | yes |
| Approximate price of operational unit (including controller, computer options necessary, etc.) | $22,300 to $36,000 |
— | $17,400 | $17,400 | Included | $13,500 | — | $21,500 | $21,500 | $19,500 | $26,000 | $30,000 | $30,000 |
| High speed paper tape reader (yes, no) | yes | yes | yes | yes | yes | no | yes | yes | yes | yes | yes | yes | yes |
| Speed (char/sec) | 300 | 300 | 300 | 300 | 60 | — | 300 | 300 | 300 | 300 | 300 | 300 | 300 |
| Approximate price of operational unit | $3,800 | $2,500 | $2,500 | $2,500 | $1,750 | — | N/A | $3,300 | $3,000 | $3,000 | Combination $12,000 |
$4,000 | $4,000 |
| High speed paper tape punch (yes, no) | yes | yes | yes | yes | no | no | yes | yes | yes | yes | yes | yes | yes |
| Speed (char/sec) | 110 | 50 | 60 | 60 | — | — | 60 | 110 | 110 | 120 | 120 | 100 | 100 |
| Approximate price of operational unit | $4,500 | $3,000 | $3,800 | $3,800 | — | — | N/A | $4,200 | $4,000 | $4,000 | Combination $12,000 |
$4,000 | $4,000 |
| NOTE: N/A = Not Announced—or Not Available | |||||||||||||
| MANUFACTURER / MODEL NUMBER | Tempo Computers Inc. Tempo 1 |
Varian 620i |
Digital Equipment Corp. LINC-8 |
Digital Equipment Corp. PDP-8/1 |
Digital Equipment Corp. PDP-8/L |
General Automation SPC-12 |
Motorola MDP-1000 |
Sears Computers Inc. Micro Line |
Business Information Technology 480/482 |
Computer Automation PDC-808 |
Data Technology DT-1600 |
General Automation SPC-8 |
Varian 520i |
| MEMORY | |||||||||||||
| Memory cycle time (µs) | 0.9 | 1.8 | 1.5 | 1.5 | 1.6 | 2.0 | 2.16 | 1 | 3.0 | 8.0 | 8.0 | 2.0 | 1.5 |
| Memory word length (bits) | 16 | 16/18 | 12 | 12 | 12 | 8 | 8 | 12 | 8 | 8 | 8 | 8 | 8 |
| Minimum memory size (words) | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K |
| Memory increment size (words) | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 4K | 1K,2K,4K | 4K | 4K | 4K | 4K |
| Maximum memory size (words) | 65K | 32K | 32K | 32K | 8K | 16K | 16K | 32K | 65K | 16K | 16K | 8K | 32K |
| Parity check (std.,opt.,no) | opt. | opt. | opt. | opt. | opt. | opt. | no | opt. | opt. | no | no | opt. | opt. |
| Memory protect (std.,opt.,no) | opt. | opt. | no | std. | std. | no | no | no | no | no | opt. | no | std. |
| CPU FEATURES | |||||||||||||
| Instruction word length(s) | 16/32 | 16/32 | 12 | 12/24 | 12/24 | 8,12,16 | 12 | 12 | 8/16 | 8/16 | 8/16 | 8,12,16 | 8/16 |
| Number of accumulators (or general purpose registers that can be used as accumulators) | 2 | 2 | 2 | 1 | 1 | 4 | 6 | 1 | 1 | 1 | 1 | 2 | 7 |
| Number of hardware registers (not including index registers) | 7 | 6 | 10 | 4 | 4 | 8 | 9 | 12 | 8 | 8 | 8 | 6 | 7 |
| Number of index registers (indicate whether they are hardware, memory or other techniques) | 1 hardware |
2 hardware |
8 memory |
8 memory |
8 memory |
3 hardware |
3 hardware |
16 memory |
none |
none |
none |
1 hardware |
1 hardware |
| How many bits for operation code | 4 | 4 | 2,3,7 | 3 | 3 | 8 | 8 | 7 | 8 | 6 | 4 | 8,12 | 3 |
| How many bits for address modes | 3 | 3 | 3 | 1 | 1 | 3 | 3 | 5 | none | 2 | 2 | 3 | 3 |
| Number of addressing modes | 8 | 4 | 6 | 2 | 2 | 5 | 6 | 4 | 1 | 4 | 2 | 4 | 5 |
| How many bits for address | 9/16 | 9/11 | 12,10,8,4 | 8/15 | 8/13 | 12 | 12 | 12 | 8/16 | 8 | 8 | 12 | 15 |
| In this machine one can directly address ____ words | 512 | 2,048 | 1,024 | 256 | 256 | 4,096 | 4,096 | 1,024 | 256 | 512 | 512 | 4,096 | 4,096 |
| in ____ µs | 0.9 | 3.6 | 3.0 | 1.9 | 1.6 | 4.2 | 4.32 | 2.0 | 3.0 | 24.0 | 16.0 | 4.2 | 2.5 |
| and indirectly address ____ words | 65K | 32K | 4K | 32K | 8K | 4K | 4K | 1K | 65K | 16K | 16K | 4K | 32K |
| in ____ µs | 1.8 | 5.4 | 4.5 | 3.0 | 3.2 | 6.3 | 10.8 | 3.0 | 23.25 | 40.0 | 32.0 | 6.3 | 5.25 |
| Indirect addressing (multi-level, single-level, no) | Multi- level |
Multi- level |
Single- level |
Single- level |
Single- level |
Single- level |
Single- level |
Single- level |
Single- level |
Multi- level |
Multi- level |
Single- level |
Multi- level |
| ARITHMETIC OPERATIONS | |||||||||||||
| Store time for full word (µs) | 1.8 | 3.6 | 3.0 | 3.0 | 3.2 | 4.2 | 4.32 | 2.0 | 14.25 | 24.0 | 24.0 | 4.2 | 4.5 |
| Add time for full word (µs) | 1.8 | 3.6 | 3.0 | 3.0 | 3.2 | 4.2 | 4.32 | 2.0 | 14.25 | 24.0 | 24.0 | 4.2 | 4.5 |
| Fixed-point hardware mult/divide (std., opt., no) | opt. | opt. | mult.-std. div.-opt. |
opt. | no | no | no | mult.-std. div.-opt. |
opt. | no | no | no | no |
| Multiply time hardware (µs) | 7 | 10 | 34 | N/A | — | — | — | 14 | N/A | — | — | — | — |
| Divide time hardware (µs) | 9 | 10-14 | 37 | N/A | — | — | — | — | N/A | — | — | — | — |
| Multiply time software (µs) | — | 200 | — | 360 | 360 | N/A | N/A | 300 | N/A | 1,100 | 1,200 | 400 | N/A |
| Divide time software (µs) | — | 200 | 460 | 460 | 460 | N/A | N/A | 1700 | N/A | 1,880 | 1,500 | 500 | N/A |
| I/O CAPABILITY | |||||||||||||
| Data path width (bits) | 8/16 | 16/18 | 12 | 12 | 12 | 8/12 | 12 | 12 | 8 | 8 | 8 | 8/12 | 8/16 |
| Direct memory access (DMA) channel (std., opt., no) | opt. | opt. | std. | opt. | opt. | opt. | opt. | std. | std. | no | no | opt. | opt. |
| Maximum DMA word transfer rate | 800 KHZ |
200 KHZ |
666 KHZ |
666 KHZ |
625 KHZ |
430 KHZ |
430 KHZ |
1.0 MHZ |
250 KHZ |
— | — | 430 KHZ |
660 KHZ |
| Number of external priority interrupt levels provided in basic system | 4 | none | 1 | 1 | 1 | 2 | 1 | 1 | 1 | 3 | 3 | 2 | 3 |
| Maximum number of external interrupts | 256 | 64 | 1 | 64 | 64 | 256 | 64 | 1 | 1 | 64 | 32 | 256 | 11 |
| Response time (µs) including time to save registers of interrupted program and initiate new program execution | 3.6 | N/A | 14.0 | 14.0 | 18.6 | 20.0 | N/A | 8.0 | 50.0 | 88.0 | 32.0 | 20.0 | 1.5 |
| OTHER FEATURES | |||||||||||||
| Power failure protect (std., opt., no) | std. | opt. | opt. | opt. | opt. | opt. | opt. | std. | opt. | opt. | opt. | opt. | opt. |
| [Pg 85]Automatic restart after power failure (std., opt., no) | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. | opt. |
| Real-time clock or internal timer (std., opt., no) | opt. | opt. | opt. | opt. | opt. | std. | std. | opt. | opt. | opt. | opt. | std. | opt. |
| SOFTWARE | |||||||||||||
| Assembler (1 pass, 2 pass, both) | both | 2 pass | both | both | both | 1 pass | 2 pass | 2 pass | 3 pass | 2 pass | 2 pass | 1 pass | 2 pass |
| Relocatable assembler (yes, no) | yes | no | yes | yes | yes | yes | yes | no | no | no | yes | yes | yes |
| Minimum core size necessary to use this relocatable assembler | 4K | — | 8K | 8K | 8K | 4K | 4K | — | — | — | 4K | 4K | 4K |
| Macro assembler capability | yes | no | yes | yes | yes | no | yes | no | no | no | no | no | no |
| Compilers available (specify explicitly, e.g., Fortran II, IV, ASA Basic Fortran, etc.) | ASA Basic Fortran |
Fortran II | Fortran II Algol |
Fortran II Algol |
Fortran II Algol |
none | none | none | ASA Basic Fortran |
none | none | none | none |
| Conversational compilers (e.g., FOCAL, BASIC, CAL, etc.) | none | none | BASIC FOCAL |
BASIC FOCAL |
BASIC FOCAL LAP-6 |
no | no | no | no | no | no | no | no |
| Real-time executive monitor available (yes, no) | no | no | no | no | no | yes | yes | yes | yes | no | no | yes | no |
| Disc operating system available (yes, no) | no | no | yes | yes | yes | no | no | no | no | no | yes | no | no |
| BASIC MAINFRAME COSTS | |||||||||||||
| Basic system price with 4K words including power supplies | $15,000 | $12,100 | $38,000 | $12,800 | $8,500 | $6,400 | $8,500 | $46,500[E] | $9,310 | $6,600 | $6,600 | $6,400 | $7,500 |
| Price of ASR-33 Teletype (if not already included in Basic System Price) | Included | $1,800 | Included | Included | Included | $1,100 | $1,200 | Included | Included | $1,500 | $1,900 | $1,100 | $1,400 |
| Total system price, including ASR-33 Teletype and CPU | $15,000 | $13,900 | $38,500 | $12,800 | $8,500 | $7,500 | $9,700 | $46,500[E] | $9,310 | $8,100 | $8,500 | $7,500 | $8,900 |
| Basic system price with 8K words including adequate power supplies, enclosure, control panel | $19,000 | $18,500 | $47,500 | $16,300 | $13,200 | $9,600 | $11,500 | $56,500[E] | $11,250 | $8,800 | $8,800 | $9,600 | $10,000 |
| Price of ASR-33 Teletype (if not already included in Basic System Price) | Included | $1,800 | Included | Included | Included | $1,100 | $1,200 | Included | Included | $1,500 | $1,900 | $1,100 | $1,400 |
| Total system price, including ASR-33 Teletype and CPU | $19,000 | $20,300 | $47,500 | $16,300 | $13,200 | $10,700 | $12,700 | $56,500[E] | $11,250 | $10,300 | $10,700 | $10,700 | $11,400 |
| PERIPHERALS AVAILABLE | |||||||||||||
| Magnetic tape available (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Approximate price for operational unit (including controller, computer options necessary, etc.) | $12,000 | N/A | $24,700 | $24,700 | $24,700 | $11,000 | N/A | N/A | $18,700 to $22,500 |
$5,700 to $10,000 |
$9,950 | $9,800 | $9,000 |
| Mass storage device available (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Approximate price of operational unit (including controller, computer options necessary, etc.) | N/A | N/A | $6,000 | $8,700 to $15,700 |
$8,700 to $15,700 |
$6,000 to $15,000 |
N/A | N/A | $7,390 | $16,500 to $9,950 |
$10,000 | $6,000 to $15,000 |
N/A |
| High speed paper tape reader (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Speed (char/sec) | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 |
| Approximate price of operational unit | N/A | N/A | $2,500 | $2,000 | $2,000 | $3,000 | N/A | N/A | $2,300 | $2,200 | $3,300 | $3,000 | $2,900 |
| High speed paper tape punch (yes, no) | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes | yes |
| Speed (char/sec) | 60/120 | 60/120 | 50 | 50 | 50 | 120 | 120 | 120 | 60 | 60 | 60 | 60/120 | 60 |
| Approximate price of operational unit | N/A | N/A | $2,000 | $2,000 | $2,000 | $4,000 | N/A | N/A | $3,000 | $3,300 | $2,900 | $3,600- $4,000 |
$3,300 |
| NOTE: N/A = Not Announced—or Not Available | |||||||||||||
| [E] Price includes 2 mag tapes and crt with keyboard | |||||||||||||
At the November 1962 "Grossinger Conference on the Utilization of Multiparameter Analyzers in Nuclear Physics" a paper by W. F. Miller and H. W. Fulbright was presented in which data-analysis systems then in use in AEC-sponsored laboratories in the fields of high-and low-energy nuclear physics were reviewed. By that time many applications of computers had already been made in the high-energy field, while there were only a few examples of computer systems to be found in low-energy laboratories, and those were rather simple. Chapter 3 gives a similar review, but in this case the high-energy field is excluded; the emphasis is concentrated on the economic aspects of data-acquisition systems used in low-and medium-energy physics. In the earlier paper, only AEC-sponsored laboratories were covered, but in the present case some NSF-supported laboratories are also included. Chapter 3 is a condensed version of a paper presented by H. W. Fulbright at the Skytop "Conference on Computer Systems in Experimental Nuclear Physics" in March 1969.
The first part of Chapter 3 presents a review and a simple analysis of the expenditures for on-line computing in a total of 36 different laboratories supported by the AEC and NSF. The second part presents a discussion of trends visible in, or suggested by the analysis, along with some other remarks about the support of on-line computing facilities in nuclear-physics research laboratories.
Most of the information was supplied by the AEC. It was requested by Paul W. McDaniel in letters sent in December 1968. Information was received from about 90 percent of those from whom it was requested. It was then forwarded to the author C. V. Smith, arriving in the first two weeks of February 1969. The NSF found that certain administrative regulations made the sending out of a questionnaire a complicated procedure, so a different approach had to be adopted in their case. Letters requesting the information were sent by the reviewer himself directly to laboratory directors, the appropriate names and addresses having been kindly supplied [Pg 87] by William Rodney of the NSF. Here the response was less complete. Most of the returns arrived by February 21, 1969.
A large amount of information was available for analysis. In many cases the laboratory involved had done a thorough job, and the numbers presented in those cases were especially valuable in providing a basis for estimating expenses for various items omitted in less complete reports from other laboratories, particularly in the case of manpower. In some ways, the information necessarily remained incomplete because no practical means of obtaining it occurred to the reviewer; the organization of the material in the analysis reflects this fact.
| Institutions Reporting Systems | |
| Place | Number of Systems |
| Brookhaven National Laboratory | 7 |
| University of California at Los Angeles | 1 |
| University of Kansas | 1 |
| Lawrence Radiation Laboratory | 8 |
| University of Maryland | 1 |
| University of Minnesota | 1 |
| Oak Ridge National Laboratory | 6 |
| University of Texas | 1 |
| Texas A & M | 1 |
| Yale | 2 |
| University of Wisconsin | 1 |
| University of Colorado | 1 |
| Argonne National Laboratory | 2 |
| Columbia University | 3 |
| University of Washington | 1 |
| University of Pennsylvania | 1 |
| University of Iowa | 1 |
| Ohio State University | 1 |
| University of Rochester | 1 |
| Michigan State University | 1 |
| Stanford University | 1 |
| Rutgers-Bell Labs. | 2 |
Transcriber's Note:
On page 69, item 6. was written as 5. in the original.