Using GEMOC Framework infrastructure allows to build many other tools.
Some of these tools are directly distributed as GEMOC features, some other can be downloaded separately either using the GEMOC discovery service or using the Eclipse Market place.
For example, assigning an execution semantics onto a language allows the use of modelchecking and exhaustive exploration tools such as clocksystem.
One benefit of assigning an execution semantics onto a DSL is to pave the way for exhaustive exploration. Exhaustive exploration is a technique used in complex and safety system design to ensure the correct adequacy between the system requirements and the real behavior of the system. This is made possible by exploring and verifying properties on an exhaustive finite state space of the system representing the whole set of relevant configurations your system may reach.
Gemoc provides the first step towards exploration and verification by building the graph of all the possible schedules of a system model constrained with MoCCML. It can then be used in a model-checking tool to verify behavioral properties of the MoCCML models. Thanks to Gemoc approach the execution model is explicited and can be manipulated to for instance:
- Verify temporal logic properties (safety and liveness) on the state space graph structure;
- Extract a schedule that optimizes specific objectives;
- Extract system properties by static analysis of an event-graph representation of the execution model.
In the Gemoc approach the steps toward exploration and verification during language design are described in Section 4, “Exhaustive Exploration and Verification at Language Design Time”.
Besides the steps toward exploration and verification during modeling design are:
- Generate a model for an exhaustive exploration tool using the configuration file;
- Invoke ClockSystem's services to generate a finite state space of the system;
- Formalize a set of properties to verify(in CDL language for instance);
- Use a model checking infrastructure to perform the verification of properties on the finite state space(like OBP).
The flow toward exhaustive exploration and verification in Gemoc is presented in figure Figure 8, “The exploration and verification flow in Gemoc” and described in the following sections.
ECL specification is the starting point toward exploration. In this specification we define events associated with the actions of the DSA and also events associated with the DSE events. On these event bindings we apply the MoccML relations of the MoC Library to schedule the events. A finite state space of a system uses such scheduling constraints and therefore is generated from using a transformation:
In the Modeling workbench where the DSL instance model is realized, the transformation T2 takes as input the instance system model to generate a MOCC instance model described in ClockSystem specification format.
Th call the transformation right-click on your model → ![]() Exhaustive Exploration →
Exhaustive Exploration → ![]() Generate ClockSystem file from DSL model.
Generate ClockSystem file from DSL model.
A wizard allows you to select one xdsml project referencing a concurrent model, click on finish to execute the transformation. T2 generates the .clocksystem file corresponding to the Mocc-based specification model to take as input in ClockSystem.
ClockSystem is a meta-described clock-constraint engine developped during Gemoc which embeds a formal model of logical time. It relies on the primitives provided by Clock Constraint Specification Language (CCSL) defining a simple yet powerful toolkit for logical time specifications. It also extends the CCSL language, through an automata-based approach, with domain-specific user-defined operators and provides an embedded DSL for writing executable specification in a language close to the abstract CCSL notation.
ClockSystem toolkit provides the possibility to perform exhaustive reachability analysis of relation specifications (e.g. MoCCML or CCSL specifications). The possibility to exhaustively explore the state-space of a given specification paves the way to verification of properties by model-checking as such an interface with the OBP model-checking toolkit was developed.
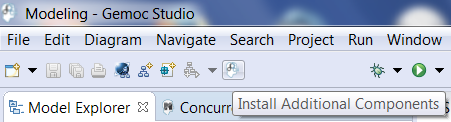
ClockSystem consists of an image and a Pharo VM which depends on the operating system. Their integration in Gemoc studio can be realized through the discovery mecanism. To activate discovery mecanism click on the Gemoc icon in toolbar as illustrated Figure 35, “Discovery”.
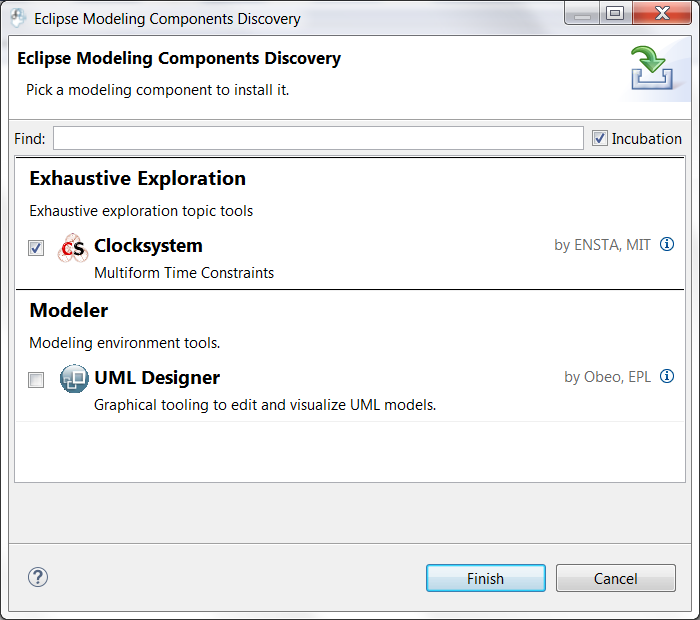
Select ClockSystem add on Figure 36, “Discovery Components” and click on Finish.
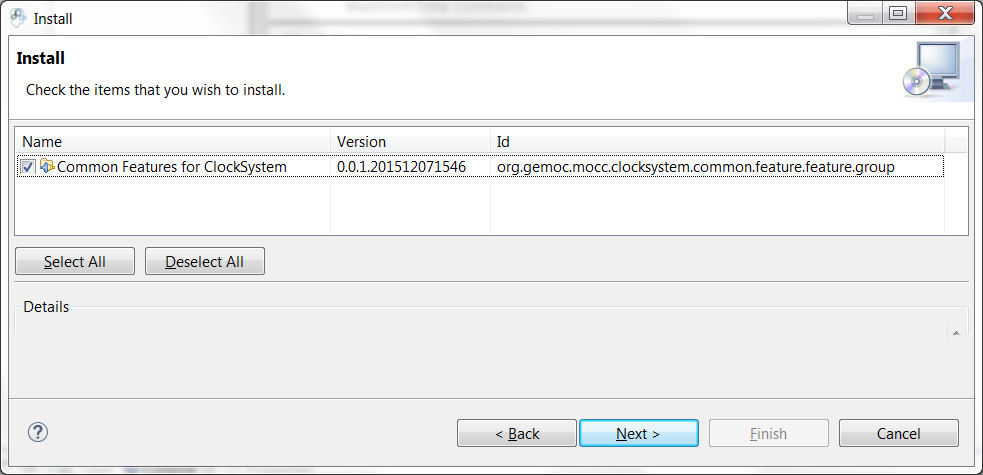
Select the unique feature and Next as illustrated in Figure 37, “Discovery Clocksystem”. Then again select Next.
Approve the licence and click Finish. Gemoc must be restarted(this should be automatically prompted to the user).
Note
ClockSystem VM and Image will be extracted in your default temporary folder at the first call of Clocksystem services. Although Gemoc provides an action to invoke ClockSystem, it can be also used as a standalone application outside of Gemoc studio.
Calling ClockSystem from Gemoc studio on the file generated by T2(.clocksystem) generates exploration results including a LTS.
To invoke ClockSystem right-click on the ClockSystem file .clocksystem→![]() ClockSystem →
ClockSystem →![]() Execute ClockSystem .
Execute ClockSystem .
Generated files are:
- .lts file stores labeled transition system (LTS) which represents all the possible configurations the system can reach.
- obp.lts file stores labeled transition system (LTS) in a format understandable by OBP.
- .results extract global information about the size of the explored graph(number of states, transitions and time of exploration).
- full.gml is the representation of the LTS graph stored in a Graph Modelling Language (GML) format providing a simple syntax to represent graph.
- fcr.gml is the representation of the LTS graph with the coincidences flatten for Fiacre stored in GML.
- .mtx stores the representation of the LTS graph as a Matrix Market providing a simple and standardised way to exchange matrix data.
The picture below illustrates an instance and its corresponding exploration graph Figure 39, “Exploration Graph for an Instance”.
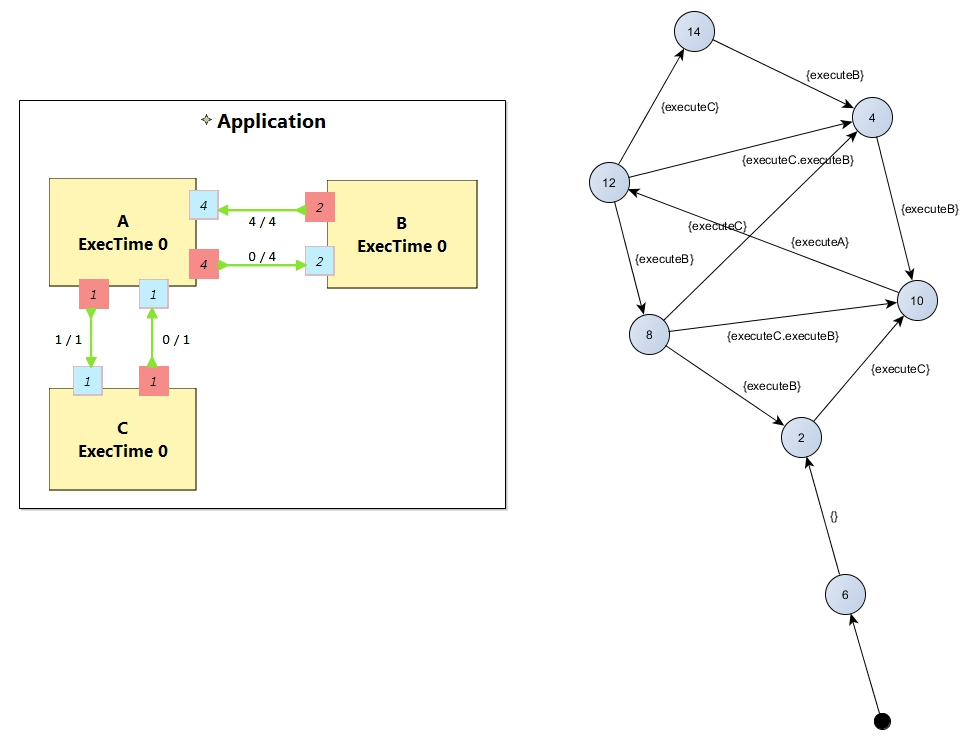
The properties are expressed using assertions or/and observer automata with appropriate variables and clocks of the model instance. Several groups of properties are interesting to verify at different level in the Gemoc process. Properties can be expressed on the model instance based on variables and clocks of one (or several) model element(s) and allows to check deadlocks, precedency between events, reachability etc… The expression of the properties are model dependent so on each instance you must rewrite the properties. However properties can also be related to representative instances which are based on a mapping between a generic abstract syntax, or a metamodel pattern and a mapped Mocc on this abstract syntax. In this approach we are looking for a reducing number of instance to verify and increase the generality of the verification approach. A representative instance is a model that spreads a configuration that is structuraly relevant regarding the metamodel pattern. On this representative model, we can verify properties tightly linked with the MoCCML semantics.
For instance the model Figure 39, “Exploration Graph for an Instance” can be considered as a representative instance of a Classifier-Relationship metamodel pattern. On it wish to apply a Mocc SDF semantics and therefore generic properties can be expressed as: - If all the input ports of a Block haven’t enought data to consume then the Block canno’t execute. - If the number of data of an output port is less than the Connector capacity minus the current size of the Connector then the Block can execute. - In any case, the current size of a Connector canno’t exceed its capacity.
These properties are representatives of the Mocc and could be verified for every model. So we verify these properties on the representative model instance, to improve the trust on our pattern.
Properties have to be formalized for a checking tool. As ClockSystem provides a connector to OBP model-checking infrastructure we present a CDL formalization of the properties, which is also an OBP compatible format. The CDL formalism provides 3 distincts constructs for expressing safety and bounded-liveness properties predicates to express invariants over states, observers to express invariants over execution traces and property patterns, for simplifying the expression of complex properties.
Properties are described using CDL syntax and must be specified at instance level therefore the name of the processes or variable used in properties reflects the names and variables of instances within the verified model. CDL properties can be written in a simple text file with the extension .cdl.
For instance we impose our model to respect a SDF-like semantics and therefore we are interested in verifying properties that defines SDF: - If all the input ports of a Block haven’t enought data to consume then the Block canno’t be executed. - The current size of a Connector canno’t exceed its capacity. An internal moc variable called current_size increments or decrements respectively if a data is push or pop within the Connector, and this variable must be always lower than the maximal capacity of the Connector.
In the listing below three properties are encoded in CDL.
// Size of connector A to B never exceeds its capacity
predicate p2 is { {connectorAB}1 : currentsize <= 4 }
// If Output channel is full the Block does not execute
predicate p3 is { {connectorBA}1 : currentsize + {outport1}1 : rate <= {connectorBA}1 : capacity }
property o1 is {
start -- / p3 // -> s1
; s1 -- / / eB / -> reject
; s1 -- / not p3 / / -> start
}
// Select the properties to be checked
cdl representativeInstance is {
properties
, o1
assert p1
; assert p2
main is {skip}
}- The size of channels between A and B canno’t exceed the capacity of the connector. This is described with predicates p1 and p2 that check if the fifo size limit is reached.
- It is not possible to write in a Connector if it is full. This is checked via the observer automata o1 for one Connector. If the size of the Connector plus the output rate exceed the size limit and if then Block execute(eB) the observer o1 goes to reject state.
The OBP Observation Engine checks a set of CDL properties using reachability strategy (breath-first-search algorithm) on the graph induced by the parallel composition of the system, with its contexts.
In the context of Gemoc OBP OBP requires two input files i.e the LTS generated from ClockSystem and the CDL properties. This operation has to be done manually and is not part of the Gemoc studio tooling since OBP is not integrated to the studio.
